2.DEĞİŞKEN HAVA DEBİLİ KLİMA SİSTEMLERİ
2.1. VAV Terminal Üniteleri
2.1.1. VAV Terminal Ünitelerinin Genel Konstrüksiyonu
2.1.1.1. Konstrüksiyon Esasları.
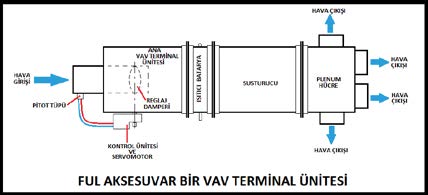
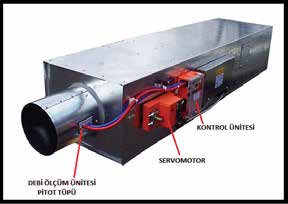
VAV terminal ünitelerinin temel görevi hava debisini mahal yükü ve konfor şartları paralelinde regüle etmektir. Bu nedenle her VAV terminal ünitesinin bünyesinde iki ana eleman bulunur.
· Debi ölçüm ünitesi
· Kontrol ünitesi
· Servomotor
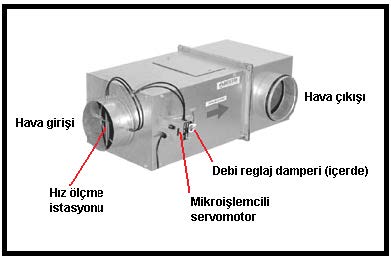
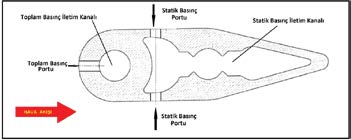
Debi ölçüm ünitesi bir venturi, orifis plakası veya pitot tüplerinden meydana gelir. Bu ünitenin temel görevi isminden de anlaşılacağı VAV terminal ünitesinden geçen hava debisinin ölçülmesidir. Pitot tüpü aşağıdaki şekilde görülmektedir.
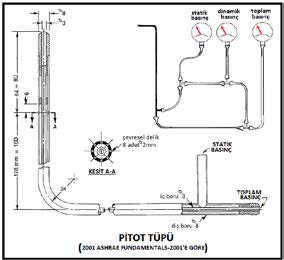
Pitot tüpleri kanallardaki havanın hızını ölçmek için en yaygın olarak kullanılan ölçme aletidir. Ölçümlerdeki hata oranı 2 m/s ve üzerindeki hızlarda %1 ila %5 arasındadır. 2 m/s altındaki hızlarda ise hassasiyeti büyük ölçüde kaybolur. Çünkü 2 Pa ve daha düşük basınçlarda hata oranı yükselmektedir. Bu nedenle ölçme tekniği olarak pitot tüpü kullanan VAV terminal ünitesi imalatçıları bu hızın altındaki değerlere kataloglarında yer vermemekte ve tavsiye etmemektedir.
Ünitenin hava geçiş alın alanı sabit olduğu için hava hızının hassas bir şekilde ölçülmesi yeterlidir. Çünkü ölçülen hava hızı ile kesit alanının çarpımı hava debisini verecektir. Bunu aşağıdaki gibi formülize edebiliriz.
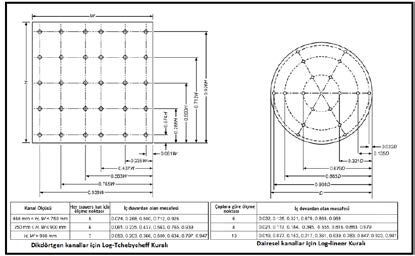
VAV terminal ünitesi içinde hava akış ipçikleri değişik hızlara sahip oldukları ve farklı hız profilleri sergiledikleri için tek noktadan ölçüm yeterli olmamakta, uygulandığı taktirde büyük hata paylarına sahip olmaktadır. Bu nedenle hız ölçümünün birden çok noktadan yapılması ve bunun ortalamasının alınarak gerekli işlemlerin yapılması gereklidir. Ölçüm noktalarının dairesel ve dikdörtgen kesitli hava kanallarında kaç adet olacağı ve hangi noktalardan yapılacağı “2013 ASHRAE Handbook Fundamentals (SI)”de detaylı bir biçimde anlatılmaktadır. Yuvarlak kanallar için “Log-Tchebycheff” veya kısa tanımıyla “Log-T” metodu önerilmekte, ancak gerekli önlemlerin alınması koşuluyla “eşit-alan metodu”nun da kullanılabileceği belirtilmektedir.
Bu ölçümlerin tamamı havanın 20oC sıcaklıkta ve 101,325 kPa basınçta olması varsayımına dayanmaktadır. Hassas ölçümler için düzeltme formüllerinin kullanılması gerekmektedir. Ancak bu düzeltmeler çok hassas ölçümler için geçerlidir.
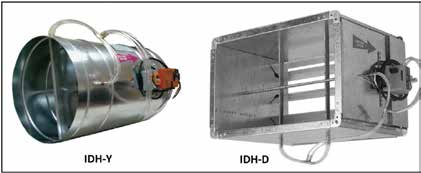
Basınç ortalamasını alabilmek için yukarıdaki şemaya uygun olarak dairesel kesitli VAV terminal ünitelerinde “+” tarzında yerleştirilmiş, dikdörtgen kesitli ünitelerde ise, büyüklük ve dikdörtgen oranına bağlı olarak “+” veya “++” tarzında pitot tüpü yerleştirilmesi yapılmaktadır. Aşağıdaki resimde İMEKSAN A.Ş. üretimi olan dairesel ve dikdörtgen kesitli VAV terminal üniteleri görülmektedir.
Yukarıdaki resimde de görülen uygulama kesiti aşağıda görülen pitot tüplerinin birbirine 90oaçı ile, VAV ünitesi hava giriş tarafına yerleştirilmesiyle gerçekleştirilmektedir. Pitot tüpü kesiti aşağıdadır.
Diğer ölçüm metodları da, pitot tüpü kadar yaygın olmamakla birlikte bazı imalatçılar tarafından kullanılmaktadır. Bu ölçüm istasyonları aşağıdaki resimlerde görülmektedir.
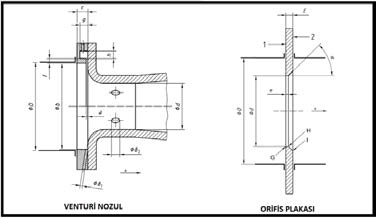
Bu metodların detaylı tartışması ölçme teknikleri kapsamına girmektedir ve konumuz dışındadır. Ancak venturi, orifis plakası ve benzeri ölçme ekipmanı ve metodlarıyla ilgilenen okuyucularımıza ISO-52677/1, ISO-52677/2, ISO-52677/3 ve ISO-52677/1 standartlarını öneririz.
Kontrol ünitesi eski VAV terminal ünitelerinde, günümüzde de ani hareketli VAV ünitelerinde ayrı bir birim olarak, ölçme istasyonu ile oransal servomotor arasında yer almaktadır. Günümüzde ise, bir mikroprosessor olarak tanımlayacağımız kontrol ünitesi servomotorun bünyesine yerleştirilmiş bulunmaktadır.

Kontrol ünitesinin üç temel görevi vardır:
· Pitot tüpü tarafından ölçülen pnömatik sinyalleri algılayarak hava hızı ve hava debisi değerlerini belirlemek.
· Gelen pnömatik sinyalleri ve hesaplanan değerleri elektronik sinyallere dönüştürmek.
· Ölçülen değerleri termostat veya bina otomasyon sisteminden gelen sinyallerle mukayese ederek, mevcut debinin istenen konumda veya
Yetersiz olduğunu saptayarak servomotora kumanda sinyali göndermek.
· İstenen mahalle, örneğin bina otomasyon sistemine sinyal (feedback) göndererek hava debisi, damper konumu gibi bilgileri aktarmak ve izlenmesini sağlamak.
Servomotor, “PI” karakteristikli oransal-integral bir motordur ve genellikle 24VAC akım ve kumanda panelinden gelen 00-10VDC sinyaller ile çalışır. Servomotorun kumanda ettiği damper, dairesel kesitli VAV terminal ünitelerinde tek kanatlı klape tarzındadır. Dikdörtgen kesitli olanlarda ise çok kanatlı ve kanatları ters yöne hareketlidir. Damperlerin sızdırmazlık oranlarını arttırmak ve by-pass oranları düşürmek için yuvarlak damper kanatlarında çevre , çok kanatlı ve dikdörtgen olanlarında ise hem çevre hem de birbirleri ile kapanma anında temas eden yerleri conta ile donatılmış olmalıdır.
VAV terminal ünitesinin gövdesi genelde galvanizli sactan ve sızdırmaz bir tarzda imal edilir. Üfleme kanalı üzerine monte edilecek olanların gövdeleri ısıya karşı izoleli olmalıdır. İzolasyon gövdenin dışına uygulanır.
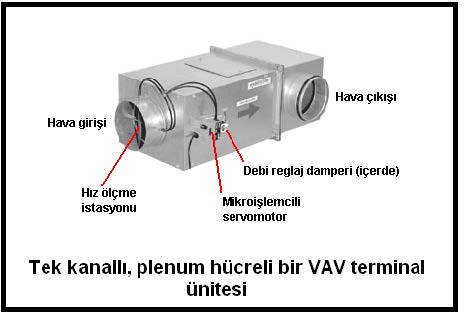
VAV terminal ünitelerinin çıkış tarafına, menfezlere klimatize hava dağıtımında kolaylık sağlamak amacıyla plenum hücreler takılabilir. Bu hücrelerden esnek hava kanallarıyla menfez ve difüzörlere havanın iletimini sağlamak mümkündür. Plenum hücre ile terminal ünitesi arasına gerektiğinde, elektrikli veya sıcak sulu hava ısıtıcı batarya, susturucu takmak, bu elemanların tümünün fabrikasyon olarak ünite üzerine montajını yapmak mümkündür. Ekteki kataloglarda bu elemanları bulmak mümkündür.
2.1.1.2. Kalibrasyon Esasları
VAV Terminal ünitelerinin diğer dinamik terminal cihazlarından, örneğin fan-coil cihazlarından, endüksiyon cihazlarından, statik soğutmalı ünitelerden temel farkı onlar gibi seri olarak üretilmelerine rağmen projede belirtilen değerlere göre her birinin bağımsız olarak ve teker teker kalibre edilmeleridir. Çünkü aynı model ve çaptaki VAV terminal ünitelerinin projede gösterilen görevleri, örneğin maksimum ve minimum hava debileri birbirlerinden farklıdır. Bu nedenle üretim aşaması tamamlanmış olan VAV ünitelerinin mutlaka kalibre edilmesi gerekir.
Aşağıdaki şemada İMEKSAN A.Ş.’ne ait kalibrasyon istasyonlarının akış şeması görülmektedir.
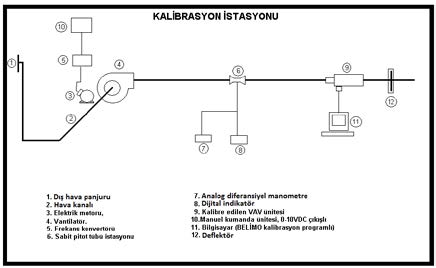
VAV terminal ünitelerinin kalibrasyonunda dikkat edilecek en önemli hususlardan biri hız ölçme istasyonunun hassasiyetidir. VAV terminal ünitelerinin kalibrasyonu esnasında kalibrasyonu yapan teknik personel tarafından hız ölçme hassasiyetinin sürekli kontrol edilmesi gerekir. Bu hususu İMEKSAN A.Ş.’nin kalibrasyon standında inceleyeceğiz. Firmada değişik çaplardaki terminal ünitelerini kalibfre etmek için dört değişik kalibrasyon standı bulunmaktadır. Her standda kalibrasyon programı yüklü bir bilgisayar bulunmaktadır (No.11). Kalibre edilmek istenen minimum ve maksimum debiler bu programda belirlenir ve uygulanır. Program aynı zamanda debileri de dijital ortamda, bilgisayar monitöründe göstermektedir. Bunun haricinde debi ölçüm ve kontrolu için bilgisayardan bağımsız bir pitot tüplü sabit ölçüm istasyonu bulunmaktadır (No.6). Bu ölçüm istasyonu biri elektronik dijital (No.8), diğeri analog (No.7) olmak üzere iki göstergeye bağlıdır. Bu göstergelerde ölçülen dinamik basınç ve debi gösterilir. Burada okunan değerlerin arasındaki fark %5’ten fazla olmamalıdır. Keza 7 ve 8 numaralı göstergelerde okunan debi ile bilgisayar monitöründeki debi birbirlerini tutmalıdır. Buradaki farklılık ta %5’ten büyük olmamalıdır. Dolayısıyla kalibrasyon istasyonunun üç ana gruptan oluştuğunu var sayabiliriz.
· Fan Grubu: İstenen debiyi temin edebilecek büyüklükte bir vantilatör, elektrik motoru, frekans konvertörü ve elektrik motoru devri ile fan debisini manuel ayarlayabilmek için bir manuel kumanda ünitesinden (No.10) meydana gelmektedir. Kaba debi ayarı burada yapılır.
· Ölçüm ve kontrol ünitesi: Kalibre edilmiş bir pitot tüpü (No.6),dijital indikatör (No.8) ve analog basınç göstergesinden (No.7) ibarettir. Kendi içinde kontrolu gerçekleştirdiği gibi vantilatörün manuel olarak hassas ayarını da sağlar. Diğer bir görevi de kalibrasyon değerlerinin doğrulanmasıdır.
· Kalibrasyon ünitesi: Kalibre edilecek VAV terminal ünitesi (No.9) ile özel yazılım yüklü bilgisayardan (No.11) meydana gelmiştir. Standa monte edilmiş olan VAV terminal ünitesinin minimum ve maksimum debilerde kalibrasyonunu ve bu değerlerin VAV ünitesi üzerindeki kontrol ünitesine (servomotor bünyesinde) yüklenmesini sağlar.
Yukarıda da bahsedildiği gibi VAV terminal ünitelerinin her proje ve kullanım için ayrı ayrı kalibre edilmeleri bir zorunluluktur. Bu nedenle ünite bir bütün olarak servomotor, pitot tüpü ve damperi ile bir arada kalibre edilmelidir. Çünkü cihaz bir bütündür ve bir bütün olarak çalışacaktır. Servomotorun ayrı olarak kalibre edilmesi ve bilahare üniteye takılması kabul edilemez.
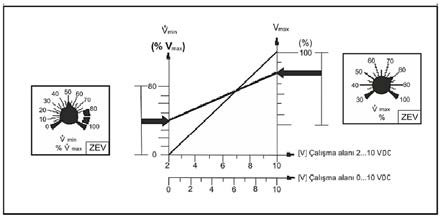
VAV terminal üniteleri kalibre edilirken nominal debileri esas alınır. Bu debi üretici firma tarafından belirlenir ve genelde o ünitenin çalışabileceği maksimum debiye tekabül eder. Üretici firmaların kataloglarına bakıldığında minimum debi, maksimum debi ve bu iki debi arasındaki debiler hız aralığıyla gösterildiğini görürsünüz. Minimum debi 2 m/saniyedir. Çünkü bu hız yaklaşık 2 paskal dinamik basınca eşittir ki pitot tüpünün hassas ölçüm yapabildiği alt sınırdır. Maksimum debi için bir üst sınır olmamakla birlikte yüksek basınç kayıpları ve ses seviyeleri ile damperlerdeki muhtemel kaçaklar nedeniyle imalatçı firmalar yuvarlak gövdeli ünitelerde 12 m/san., dikdörtgen kesitli gövdeye sahip ünitelerde ise 10 m/san olarak limitlemektedir.
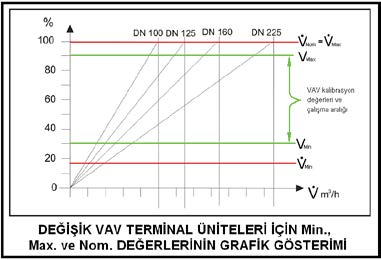
Kalibre edilecek VAV terminal ünitesinin “Vmax” ve “Vmin” değerleri yukarıdaki grafik çizimde gösterildiği gibi imalatçı firma kataloglarında gösterilen maksimum ve minimum debilerin arasında olmalıdır.
Kalibrasyon işleminin başlangıçında ilk olarak standın vantilatörü çalıştırılır. Pitot tüpünün verilerine göre istenen maksimum debiye yaklaşık olarak ayarlanır. Bu işlem frekans konvertörüne kumanda eden manuel kontrol ünitesi ile yapılır. İstenen debi indikatörde okunduktan sonra yapılacak ikinci işlem bilgisayara nominal debinin girilmesidir. Maksimum ve minimum debiler de nominal debinin yüzdeleri olarak girilir. Bu bilgiler, servotor ve damperin çalıştırılması ile gerçekleştirilir ve kontrol ünitesinde mevcut mikro işlemciye aktaruılır ve kaydedilir. İşlem tamamlandığında artık VAV terminal ünitesi, örneğin 2 VDC sinyal aldığında minimum debide, 10 VDC sinyal aldığında ise maksimum debide çalışacaktır. Bundan sonra doğrulama işlemine geçilir. Bu işlem esnasında vantilatörün debisi arttırılır ve VAV terminal ünitesinin istenen debiyi yakalayıp yakalamadığı gözlenir. Genelde yakaladığı görülür ve işlem tamamlanır.
Her VAV ünitesi kalibre edildikten sonra mutlaka bir kalibrasyon sertifikası hazırlanmalı ve üniteye eklenmelidir. Sertifikada şu bilgiler yer almalıdır.
· İmalat yılı ve seri numarası
· Kalibre eden kişinin adı, soyadı ve imzası
· Müşteri/proje adı
· Projede kullanıldığı yer, varsa özel tanımı
· Kalibrasyon ölçüm değerleri ve grafiği
2.1.1.3. VAV Terminal Ünitelerinin Otomatik Kontrolu
VAV terminal ünitesi, yalnız mahal şartlarına bağlı olarak hava debisini değiştiren bir elemandan ibaret değildir. Bu üniteye çok yönlü görevler yüklenebileciği için bu görevlere uygun otomatik kontrol donanımı ile teçhiz edilmiş olmalıdır. Bu görevleri şu şekilde sıralıyabiliriz:
· Mahal kuru termometre sıcakılığına bağlı olarak oransal debi reglajı.
· Yaz-kış değişimi (change-over)
· Yaz oransal debi kontrolu, kış minimum sabit debi sevki
· Kış çalışması için ısıtıcı serpantin ilavesi ve kullanımı
· Değişen basınçlar karşısında sabit debi uygulaması
· Tam kapama fonksiyonu
· Mahalde gereğine göre positif veya negatif basınç uygulaması
· Dönüş kanalındaki VAV ünitesi ile birincil-ikincil (master-slave) uygulaması
· BMS , DDC veya manuel olarak gönderilen sinyaller paralelinde konum değişiklik ve ayarı
· Bina otomasyon sistemi ile bilgi alışverişi, konum bilgi aktarılması
· Manuel kumanda olanakları
· Kalibrasyon değerlerinin değiştirilebilmesi
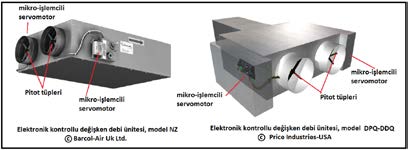
Bu görevleri daha da çoğaltmak mümkündür. Günümüzdeki uygulamalarda, özellikle ülkemizde ve Avrupa’daki uygulamalarda kontrol ünitesi olarak adlandırdığımız mikro bilgi işlemci ile servomotor tek gövde içinde entegre edilmiş olarak kullanılmaktadır.
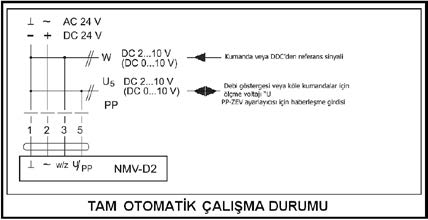
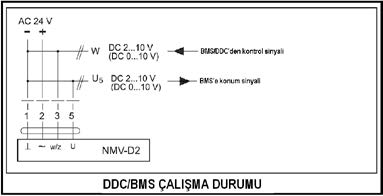
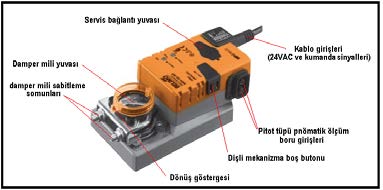
VAV terminal ünitelerinin servomotorları 24V AC ile çalışmaktadır. Bu servomotorun çalışması için gereklidir. “W” ile gösterilen kumanda sinyali ise 2-10 VDC (0-10VDC) mauel bir kumanda cihazından, bina otomasyon sisteminden, DDC kontrol panelinden veya VAV ünitesi ile uyumlu bir oda Eletronik termostatından gelebilir. Yukarıdaki bağlantı şeması BELİMO firmasının NMV-D2 VAV sermotoruna aittir. 24VDC şebeke “1” ve “2” numaralı kelemenslere bağlanmaktadır. Kumanda cihazından iki kanallı iletken ile gelen 2-10 VDC (0-10 VDC) doğru akım kumanda sinyali de “1” ve “3” klemenslerine bağlanmaktadır. Bu sayede servomotor aldığı kumanda sinyali paralelinde harekete geçmektedir.
Pitot tüplerinde ölçülen dinamik basınç (hız basınçı) servomotor bünyesindeki mikro işlemciye gönderilmekte, burada elektronik sinyale dönüştürülmektedir. Bunun için yapılan en genel uygulama minyatür bir körüğün ve buna bağlı bir reostanın aracılığıyla bu sinyali üretmektir. Ancak BELİMO firması bu işlemi çok daha hassas bir şekilde, özel olarak geliştirdiği sıcak telli anemometre vasıtasıyla yapmaktadır. Ölçülen bu hız mikro işlemcide debiye dönüştürülür ve kalibrasyon esnasında yüklenmiş olan değerlerle karşılaştırılır. Örneğin ünite 2-10 VDC ile kalibre edilmişse ve gelen kumanda sinyali 4 VDC ise, ölçülen debi 4 VDC’nin tekabül ettiği debi ile karşılaştırılır. Ölçülen debinin olması gerekenden düşük olması durumunda servomotor damperi açmaya, fazla ise kapamaya başlar. “PI” karakterindeki bu işlem belirli bir salınım sonucu istenen debiyi yakalar, servomotor, bir dahaki sinyale veya debi değişikliği ölçümüne kadar, sabit konuma geçer.
VAV terminal ünitelerinin servomotorlarının diğer bir özelliği de otomatik kumandanın yanı sıra manuel kumandaya da müsait olmalarıdır. Bu çalışma tarzı aşağıdaki çizimde görülmektedir.
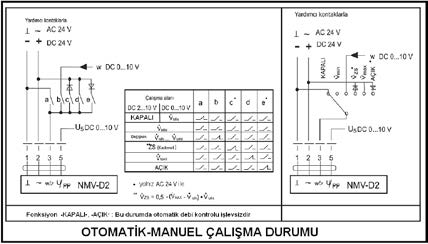
Bu işlevlerin gerçekleşmesi için yardımcı kontak kullanılması gereklidir.
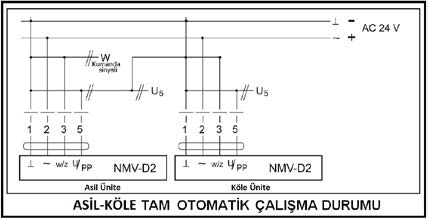
İki VAV terminal ünitesi birbirine bağımlı olarak, örneğil “asil-köle (master-slave : birincil-ikincil) olarak ta çalışırılabilirler. Bu uygulama en yaygın olarak Üfleme ve dönüş VAV terminal ünitelerinde yapılır. Bu uygulamada üfleme ünitesi asil ünitedir ve tüm kumanda sinyalleri bu üniteye gönderilir. Dönüş ünitesi ise köle ünite olarak, asil üniteye bağımlı olarak çalışır. Bu uygulamanın bağlantı şeması aşağıda gösterilmiştir.
Kalibre edilmiş VAV terminal üniteleri şantiyede, örneğin montaj işlemleri tamamlandıktan sonra maksimum ve minimum ayar değerleri yerinde değiştirilebilir ve yeniden ayarlanabilir. Ancak bu işlemin yapılabilmesi için iki koşul vardır.
· VAV terminal ünitesi montaj öncesi muhakkak kalibre edilmiş olmalıdır. Kalibre edilmemiş ünitelerin değerlerinin ayarlanması mümkün değildir.
· Nominal değerin üzerinde ayar mümkün değildir. Örneğin maksimum debi ayarı 2400 m3/h, minimum debi ayarı 480 m3/h olan bir VAV terminal ünitesinin katalogda belirtilen nomimal debisi 3000 m3/h ise maksimum debi bu rakama kadar yükseltilebilir. Bu işlemi yapan saha ekipmanının fotoğrafı ile yeniden kalibrasyon işleminin grafik gösterimi aşağıdadır.

VAV terminal üniteleri için en yaygın kumanda sinyali 0-10VDC ile 2-10VDC’dir. Bunlara ilaveten bina otomasyon sistemlerinin bazılarıyla uyumlu hale getirilebilmesi için giriş klemensine 500Ω direnç ilavesiyle 0-20mA veya 0-20mA de kumanda sinyali olarak kullanılabilir. Ancak bu özelliklerin ünitenin kalibrasyonu esnasında dikkate alınması gerekmektedir. 2-10VDC en çok tercih edilen uygulamadır. Çünkü bu uygulamada 2 VDC sinyal minimum debiye, 10 VDC sinyal maksimum debiye tekabül eder. 0 VDC sinyal de ise ünite tam kapalı duruma geçer. 0-10VDC uygulamada ise 0 VDC minimum debiye, 10 VDC de maksimum debiye tekabül eder, VAV ünitesi tam kapalı duruma geçmez. Tam kapalı durum uygulaması için ünite hava girişi tarafına ikinci bir iki konumlu servomotorlu damper konması gerekir.
2.1.2. Tek Kanallı Sistemler
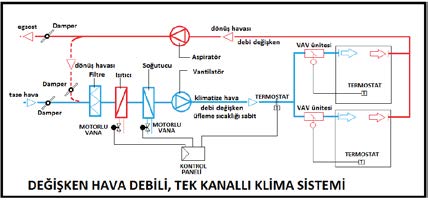
Tek kanallı değişken hava debili klima sistemleri, VAV uygulamalarının en basit olanıdır. “Yalnız soğutma” veya “yalnız ısıtma” için son derece uygun ve ekonomik çözümler sağlar. Aynı anda,simültane olarak ısıtma ve soğutma işlemlerini gerçekleştirmek bu sistem içinde, bazı değişiklik ve ilaveler yapılamdığı taktirde mümkün değildir. Bu değişiklikler aynı sistem içinde yaz-kış değişken hava debisi uygulaması, yaz değişken, kış sabit hava debisi uygulaması, terminal ünitelerine son ısıtıcı batarya ilavesi ile gerçekleştirilebilir.
Tek kanallı değişken hava debili sistemlerde yaşanabilecek en önemli sorunlardan biri de kısmi hava yüklerinde mahal havalandırılmasında sorunlar yaşanmasıdır. Genelde yanlış menfez-difüzör yerleştirilmesinden veya kısmi yüklerde gerekli taze havanın üflenememesinden kaynaklanan bu sorun ileriki bahislerde detaylı bir şekilde ele alınacaktır.
2.1.2.1. Tek Kanallı Sistem Uygulamaları
Daha önceki konularda tek kanallı değişken hava debili sistemlerinden kısaca bahsedilmişti. Aynı şekilleri bu bahis kapsamında da sunmakta yarar görüyoruz. Aşağıda tipik bir tek kanallı eğişken hava debili klima sistemi şematik olarak görülmektedir.
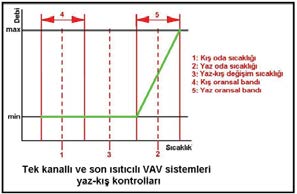
2.1.2.1.1. Yaz ve Kış Değişken Debi Uygulaması
Yaz ve kış değişken hava debisi uygulaması klimatize edilen binadaki tüm odaların perimetrik odalar olduğu, yaz uygulamasında soğutma ve kış uygulamasında ısıtma isteyen hacimlerden meydana geldiği durumlarda kullanılabilen bir sistemdir. Bu sistem, kış uygulamasında da soğutma ihtiyacı duyan, örneğin dış satıhları olmayan ancak dahili ısı kazançlarının yüksek olduğu mahallerin bulunduğu binalarda uygulanamaz. Ancak binanın dış cepheleri itibariyle çok zonlu bir yapıda olması bu uygulama için bir engel teşkil etmez.
Bu uygulamanın en büyük özelliği yaz ve kış uygulamalrındaki sıcaklıkların birbirinden farklı olması ancak sezon boyunca sabit kalmasıdır. Mahallerde sıcaklık kontrolu VAV terminal ünitelerinde debi reglajı ile yapılır.
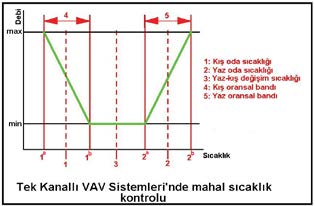
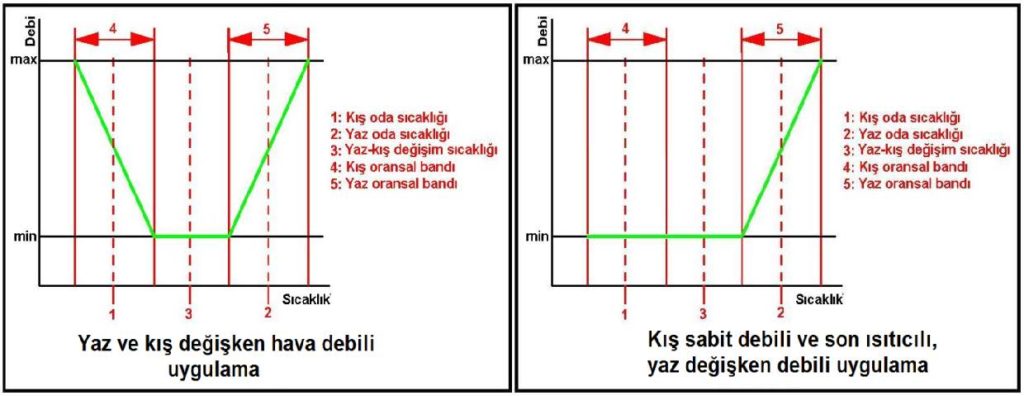
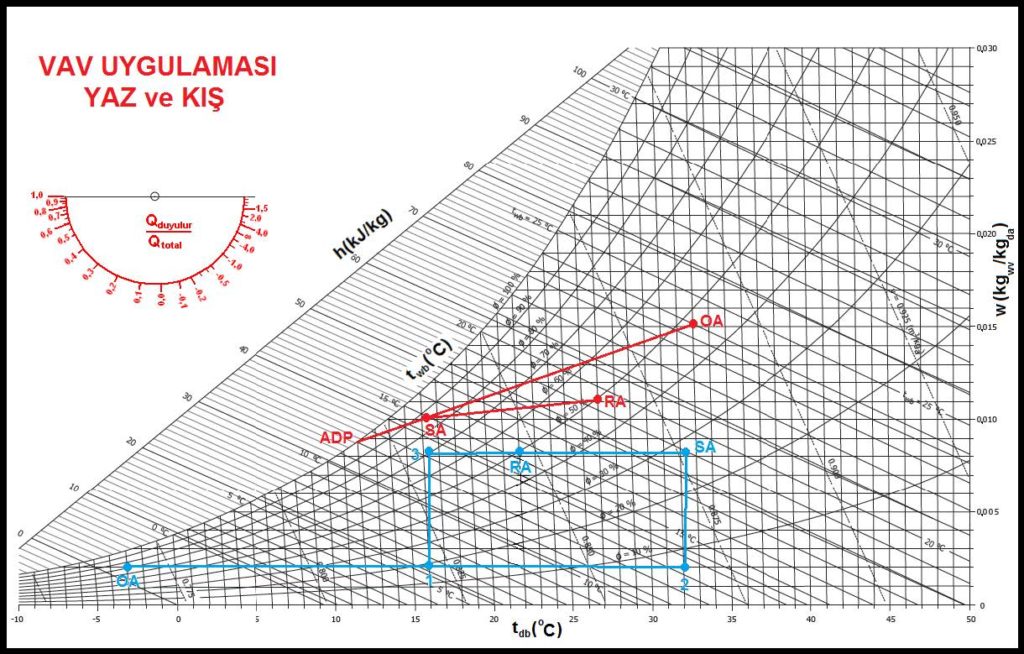
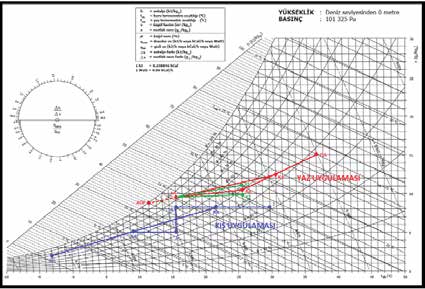
Yukarıdaki şekil yaz ve kış çalışmalarındaki debi reglajını göstermektedir. “2a” yaz uygulamasındaki minimum mahal kuru termometre sıcaklığını, “2b” de aynı uygulamadaki maksimum mahal kuru termometre sıcaklığını göstermektedir. Üflenen hava debisi “2a” sıcaklığında minimum, “2b” sıcaklığında ise maksimum debidedir; sıcaklık artışına paralel ve lineer olarak bir debi artışı izlenir. Bu uygulamaya “paralel kumanda” tabir edilir. Bu uygulama esnasında merkezi klima santralı, proje yapımcısı tarafından belirlenen sabit sıcaklıkta hava sevk eder. Benzeri şekilde “1a” kış uygulamasındaki minimum mahal sıcaklığıdır; “1b” de maksimum mahal sıcaklığıdır. Debi kontrolu sıcaklık düşüşüne paralel ve lineer olarak debi arştı izlenir. Bu uygulamaya da “ters kumanda” tabir edilir. Yaz ve kış değişken debili tek kanallı VAV sisteminin tipik bir psikrometrik diyagramı aşağıdadır.
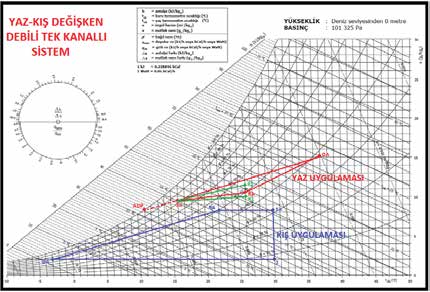
Yukarıdaki psikrometrik diyagramda %100 dış havalı bir uygulama görülmektedir. Diyagramdaki yaz uygulamasında “R1” ve “R2” değişik mahalleri, “RA” ise egzost havasını göstermektedir.Üfleme havası ”SA” sezon boyunca sabittir. “SA-R1” ve “SA-R2” proses hatlarının değişik eğimlere sahip olması odaların değişik duyulur ısı oranları “RSHR”den kaynaklanmaktadır. “SA-RA” prosesi ise merkezi santral egzost havasınının ısınma prosesini göstermekte olup tüm odaların yüklerinin aritmetik toplamlarının sonucu bulunan duyulur ısı oranına bağlı bir işlemdir.
2.1.2.1.2. Yaz Değişken, Kış Sabit Debi Uygulaması
Tek kanallı sabit hava debili sistemlerin bazı mahzurları vardır.Bunlardan birincisi kış aylarında, gerekli olmamasına rağmen değişken hava debisi kullanılması ve gereken işletme ekonomisinden az da olsa uzaklaşılmasıdır. Diğer bir mahzur ise yaz-kış devamlı soğutmaya ihtiyaç gösteren, örneğin ofis bloklarındaki iç hacimlerin klimatizasyonunu karşılayamamasıdır. Bu eksiklikleri bertaraf etmek için VAV terminal ünitelerinin hava çıkış taraflarına
son ısıtıcı batarya (zon ısıtıcısı) uygulamasına gidilmiştir. Bu uygulamanın bir öncekinden en önemli farkı yaz aylarında değişken debi uygulamasına karşın kış uygulamasında sabit debi uygulamasının yapılmasıdır. Bu sistemin debi reglajını yukarıdaki şekilde olduğu gibi gösterebiliriz. Aşağıdaki akış şemasında da yaz değişken-kış sabit debi uygulamasını görmekteyiz.
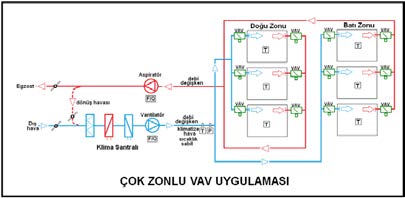
Bu sistemin en büyük özelliği yaz-kış değişken debili uygulama ile yaz değişken,kış sabit debili uygulamayı bir arada yürütebilmesidir. Akış şemasında “Doğu Zonu” ve “Batı Zonu” olarak belirlenen zonlar dış satıhları olan, kış aylarında ısı kaybı neticesi ısıtmaya ihtiyaç duyan mahallerden meydana gelmektedir ve perimetrik hacimlerin tamamını meydana getirmektedir. İç hacimler ise dış duvarı ve çatı-tavanı olmayan, dolayısıyla transmisyon ısı kaybı olmayan mahallerdir. Bu tip mahaller kış aylarında dahi soğutmaya gerek duyabilirler. Mahalde bulunan insan ve ekipmanlardan kaynaklanan duyulur ve gizli ısı kazançları, aydınlatma giderilmesi gerekli bir
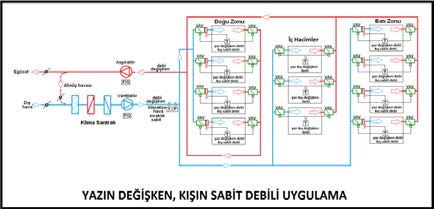
Soğutma yükü oluşturur. Bu nedenle bu mahallere kış uygulamasında dahi düşük sıcaklıkta klimatize hava sevk edilir. Mahal kuru termometre sıcaklığı ise hacimlerdeki elektronik termostat, DDC panele bağlı sıcaklık algılayıcı ve benzeri elemanlar vasıtasıyla üfleme kanalı üzerinde bulunan VAV terminal ünitesine gerekli kumanda sinyallerini göndererek üfleme debisi reglajı ile sağlanır. Dönüş-egzost kanalındaki VAV ünitesi de termostat veya DDC panelden kumanda alabileceği gibi, daha önceki konularda incelediğimiz “asil-köle” uygulamasıyla da kontrol edilebilir. Üfleme sıcaklıkları proje yapımcısı tarafından belirlenecektir. Genel uygulama yaz aylarındaki sevk havası sıcaklığının kış aylarındaki uygulama esnasında da aynen muhafaza edilmesi tarzındadır.
Yaz ve kış aylarında aynı sıcaklıkta soğuk hava üflenmesinin yaratacağı sorunları gidermek için perimetrik odalara (yukarıdaki akış diyagramında “Doğu Zonu” ve “Batı Zonu” olarak belirlenen hacimler) ait üfleme VAV terminal ünitelerinin çıkışlarına birer adet ısıtıcı batarya konulur. Bu bataryalar sıcak sulu veya buharlı olabileceği gibi elektrikli ısıtıcı da olabilir. Sıcak sulu ve buharlı ısıtma bataryalarında kontrol motorlu vanalar ile sağlanmalıdır. Sıcak sulu sistemlerde iki veya üç-yollu motorlu vanalar, buharlı ısıtıcılarda ise uygun karakteristiklerde iki-yollu motorlu vanalar kullanılmalıdır. Vanaların modüler veya iki konumlu olması oda yük karakteristikleri ve buna bağlı olarak proje müellifinin tercihine bağlıdır. Elektrikli ısıtıcılarda ise iki konumlu kumanda için kontaktör, oransal kumanda için ise tristör kullanımı tercih edilmelidir. Her iki durumda da VAV terminal ünitesi tam kapalı duruma geçtiğinde ısıtıcı elemanları devre dışı bırakacak emniyet donanımları sistemde bulunmalıdır.Bunula ilgili kumandalar VAV sermotorundaaki ilave kontaklardan veya bina otomasyon sisteminden temin edilebilir. Elektrikli ısıtıcılı uygulamalarda ise lokal normlara göre belirlenmiş üst limit emniyet termostatları bulunmalıdır. Aşağıdaki psikrometrik diyagramda, % 50 karışım havalı benzeri bir sistemin psikrometrik diyagramı görülmektedir.
Bu diyagramda kullanılan semboller bir önceki bahiste, “yaz-kış değişken hava debili sistemlerde” kullanılan sembollerle aynıdır.
Yukarıdaki örnekte yaz ve kış uygulamalarında %50 karışım havası olduğu varsayılmıştır. Buna “KA” yaz ve kış uygulamalarındaki dış hava-dönüş havası karışım noktasıdır. Yaz uygulaması değişken hava debili olduğu için 2.1.2.1.1. numaralı bahiste anlatılan yaz uygulamasından bir farklılığı yoktur. Kış uygulamasında ise karışım havası “KA” “1” noktasına kadar merkezi klima santralında ısıtılmaktadır. “1-SA” prosesi klimatize havanın “RA” mahal mutlak nem oranına kadar nemlendirilmesidir. Örneğimizde buharlı nemlendirici alınmıştır. “SA” noktası tüm hacimler için mahallere sevk havasının şartlarıdır (KT ve rH).Örneğimizde bu sıcaklık 16oC alınmıştır. Isı kaybı olmayan hacimlere üflenen bu hava VAV terminal üniteleri vasıtasıyla regüle edilmek suretiyle mahal kuru termometre sıcaklığı sabit tutarlar.
Perimetrik hacimlerde ise VAV terminal üniteleri kış uygulaması için minimum debi şartlarında çalışmaktadırlar. Bu uygulama terminal ünitelere gönderilen minimum kumanda sinyali, örneğin 2-10VDC uygulamasında 2VDC sinyal gönderimi ile gerçekleştirilir. VAV terminal ünitesinin çıkışındaki ısıtıcı batarya gelen havayı “2” şartlarına kadar ısıtırlar. “SA-RA” prosesi klimatize havanın mahal konfor şartlarına kadar ısıtılması, “RA-2” prosesi ise mahal ısı kaybının giderilmesi içindir. “2-RA” prosesi ise mahallin ısı kaybı nedeniyle sevk olunan klimatize havanın soğuma prosesidir.
2.1.2.2. Tek Kanallı Sistem VAV Terminal Üniteleri
Tek kanallı klima sistemlerinde klasik VAV terminal üniteleri, Fanlı VAV terminal Üniteleri, endüksiyon cihazları ve endüksiyonlu VAV terminal üniteleri olmak üzere dört değişik eleman kullanılmaktadır.
2.1.2.2.1 Klasik (Fansız) VAV Üniteleri
Fansız VAV terminal üniteleri, dairesel giriş-dikdörtgen kesitli çıkış, tümü dairesel ve tümü dikdörtgen gövdeli olmak üzere üç modelden oluşmaktadır. Yurtdışında, özellikle ABD ve Avrupa ülkelerinde en yaygın uygulama üfleme kanallarında dairesel giriş-dikdörtgen kesitli çıkışlı VAV terminal ünitelerinin kullanımı tarzındadır. Daha önceki bahislerde bahsettiğimiz gibi bu ünitelerin dairesel hava girişleri yüksek hızlı hava tarafıdır. Burada hava hızı 12 m/s’ye kadar çıkabilmektedir. Dikdörtgen kesitli kısım ise ünitenin plenum hücre tarafı olup düşük hızlı hava tarafıdır. Bu tarafa, herhangi bir ara parça üretimine gereksinim duyulmaksızın susturucu, elektrikli veya sulu hava ısıtıcı batarya ve hava dağıtılımı için çok çıkışlı plenum hücre eklenebilir. Plenum tarafı düşük hızlı hava tarafı olduğu için buradan elastik, esnek ve izoleli kanallarla difüzör ve menfezlere klimatize havanın iletilmesi mümkündür. Bu eklemeler fabrikasyon olarak yapılabileceği için montaj esnasında çok büyük kolaylık sağlar. Resmi 28’inci sayfa konu No. 2:1.1.1.’de görülebilir.
Dairesel kesitli, yuvarlak gövdeli VAV terminal üniteleri dairesel giriş-dikdörtgen kesitli çıkışlı ünitelere alternatif , daha düşük maliyetli üniteler olarak geliştirilmiştir. Dönüş, egzost hatlarında kullanılabildiği gibi üfleme hatlarında da kullanılabilirler. Ancak bu ünitelere susturucu, ısıtıcı batarya gibi elemanların montajı için şantiye üretimi adaptör parçalara ihtiyaç duyulur. Dairesel kesitli VAV üniteleri de 12 m/s hava giriş hızına kadar kullanılabilirler.
Dikdörtgen kesitli VAV terminal üniteleri 10 m/s hava giriş hızına kadar randımanlı bir şekilde çalışabilmektedir. Önce VAV ünitelerinde tek kanatlı damper bulunmasına karşılık bu ünitelerde çok kanatlı damperler bulunmaktadır. Orta ve düşük hava hızı uygulamaları için kullanılabilirler. Ancak damperlerinin çok kanatlı olması nedeniyle montaj esnasında muhtemel deformasyonlar by-pass tarzında hava kaçaklarına neden olabilir. Bu nedenle özellikle boyutları 500x500mm üzerinde olanların 4 m/s altındaki hızlarda kullanılmaması tavsiye olunur.
2.1.2.2.2. Fanlı VAV Üniteleri
Fanlı VAV terminal üniteleri klasik VAV terminal ünitelerinin kısmi yüklerde yaratabileceği pozitif havalandırma problemlerini gidermek için tasarlanmış ünitelerdir. Tasarımındaki temel felsefe üflenen klimatize hava ile mahal havasını değişen oranlarda karıştırıp , kısmi yüklere bağlı kalmaksızın mahalle maksimum hava debisine eşit miktarda veya ona çok yakın hava sevk ederek pozitif havalandırma problemlerinin gidermesini temin etmektir.
Fanlı VAV terminal üniteleri “Paralel Fanlı Üniteler” ve “Seri Fanlı Üniteler” olarak ikiye ayrılırlar. Bu ayrılık yalnız yerleşim tarzından ibaret olmayıp
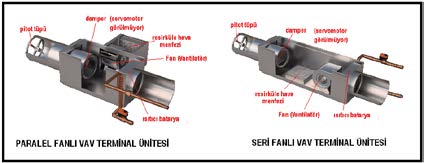
Fonksiyon açısından da farklılıklar içerir. Paralel ve seri fanlı VAV terminal ünitelerinin şematik çizimleri de bu farklılıkları ortaya koymaktadır.
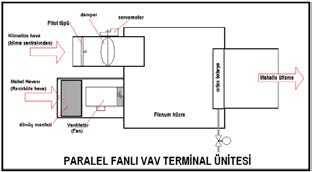
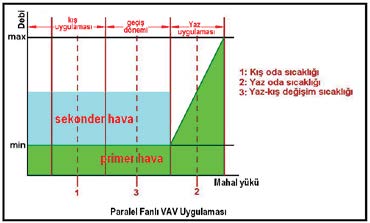
Paralel fanlı VAV terminal ünitesinde birbirinden bağımsız konumlarda bulunmakta ve hava gereksinimleri değişik yerlerden gelmektedir. Pitot tüpü, servomotor ve damperden meydana gelen VAV ünitesi primer havayı merkezi klima santralından temin etmektedir. Fan ünitesi ise bünyesinde bulunanbir emiş menfezi vasıtasıyla mahal havasını, diğer bir deyişle sekonder havayı emmekte ve bu havayı plenum hücreye üflemektedir. Paralel fanlı VAV terminal ünitelerinde fan devamlı çalışmamaktadır. Primer hava maksimum debideyken ve kısmi yüklerdeyken fan çalışmamaktadır. Ancak primer debi minimuma indiğinde, damper minimum debi konumuna geldiğinde fan çalışmaya başlamaktadır. Ünite çıkışındaki ısıtıcı batarya mecburi olmayıp proje gereksinimleri paralelinde uygulanmaktadır. Bu sayede değişken hava debili yaz sezonu uygulamalarında fan çalışmamakta, ancak debi minimuma inince fan devreye girmektedir. Minimum debi de yaz-kış değişim sezonunda, yani geçiş döneminde meydana gelmektedir. Kış uygulamasında VAV ünitesi devamlı minimum primer hava debisi konumunda bulunmakta, bu süre zarfında fan devamlı olarak çalışmaktadır.Bu çalışma prensibi aşağıdaki diyagramda gösterilmektedir.
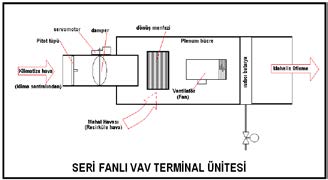
Seri fanlı VAV terminal ünitelerinde klasik VAV terminal ünitesiyle fan arka arkaya, seri olarak yerleştirilmiştir. Fan paralel fanlı uygulamanın aksine devamlı olarak çalışmaktadır ve debisi VAV terminal ünitesinden gelen debi ile dönüş menfezinden emdiği sekonder hava debisinin toplamına eşittir. Bu debi de VAV terminal ünitesinin maksimum yükteki debisine eşittir. Dolayısıyla sistem maksimum yükte çalışırken VAV damperi tam açık konumdadır ve maksimum debiyi sevk etmektedir. Bu debi de fan debisine eşit olduğundan mahalden herhangi bir emiş yapmamaktadır. Ancak kısmi yük nedeniyle klape konumu değişip primer hava debisi azaldığında fan maksimum debi ile o andaki primer hava debisi arasındaki farkı sekonder hava olarak temin etmekte ve mahalle sabit debide hava üflenmesini gerçekleştirmektedir. Seri fanlı VAV terminal ünitesi şematik çizimi aşağıda görülmektedir.
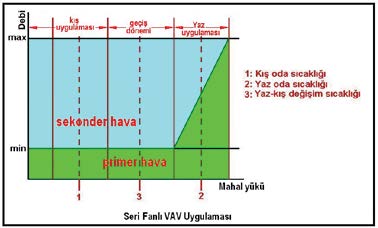
Paralel fanlı VAV terminal ünitelerinde fan debisinin maksimum debiye eşit olması şartı yoktur. Fan debisi imalatçı firma tarafından belirlenen optimum bir debidir ve bu debi maksimum debinin yaklaşık %50’si ila %80’i arasında yer alır. Seri fanlı VAV ünitelerinde fan debisi ise genelde maksimum ve minimum debiler arasındaki farka eşittir. Bu nedenle seri fanlı VAV ünitelerinin mahalle sevk ettiği klimatize hava debisi devamlı sabittir. Bu uygulama aşağıdaki diyagramda görülmektedir.
Fanlı VAV ünitelerinin kullanımı, klasik VAV ünitelerinin kullanımından kaynaklanabilen positif havalandırma problemlerini ortadan kaldırmıştır. Ancak beraberinde getirtiği temel problem enerji sarfiyatının sabit debili sistemlere oranla daha düşük seviyede olmasına rağmen klasik değişken debili sistemlerden oldukça yüksektir, çünkü her ünite içinde bir radyal vantilatör bulunmaktadır. Radyal vantilatör sayısının artması da işletme ve bakım açısından ek külfet ve maliyetler getirmektedir.
Fanlı VAV ünitelerinin birbiriyle olan mukayesesine gelince seri fanlı ünitelerin fanlı ünite uygulamaları içinde değişken hava debili klima sistemlerine en uygun ekipmanlar olarak kabul edidiğini görürüz. Çünkü seri fanlı üniteler, uygulamalarda ana sistemin değişken hava debili (VAV) çalışmasına rağmen mahallerde sabit debide hava sirkülasyonunu sağlamaktadır. Ancak seri fanlı üniteler sistem içinde devamlı çalışmak durumundadırlar. Paralel fanlı ünitelerde ise fanın devreye girmesi ancak primer hava debisinin minimuma düşmesi ile gerçekleşir. Bu nedenle seri fanlı üniteler daha fazla enerji tüketirler. Seri fanlı üniteler, ısıtıcı batarya olmaksızın yaz ve kış değişken debiye sahip VAV uygulamalarında da kullanılabilirler. Paralel fanlı üniteler ise bu uygulamaya müsait değildirler.
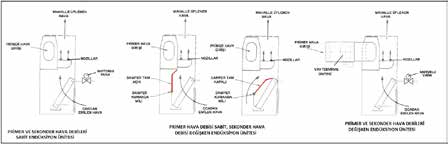
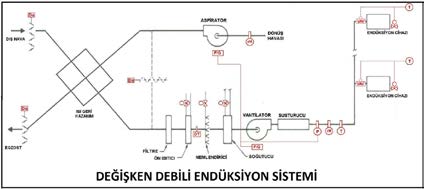
2.1.2.2.3. Endüksiyonlu VAV Terminal Üniteleri
Fanlı VAV terminal üniteleri tek kanallı, fansız VAV terminal ünitelerinde sorun olabilen pozitif havalandırmaproblemlerinin giderilmesi için geliştirilmişlerdir. Problemi büyük ölçüde çözmelerine rağmen beraberlerinde enerji, işletme ve bakım problemlerini de getirmişlerdir. Endüksiyonlu VAV gterminal üniteleri fanlı ünitelerin sağladığı avantajları aynen muhafaza ederek enerji işletme ve bakım problemlerini çözmek için geliştirilmişlerdir. Bu cihazların içinde fan olmayışı bu problemleri minimuma indirmiştir. Pozitif havalandırmayı da endüksiyon cihazlarında uygulanmakta olan prensibi kullanmak suretiyle çözmektedirler.
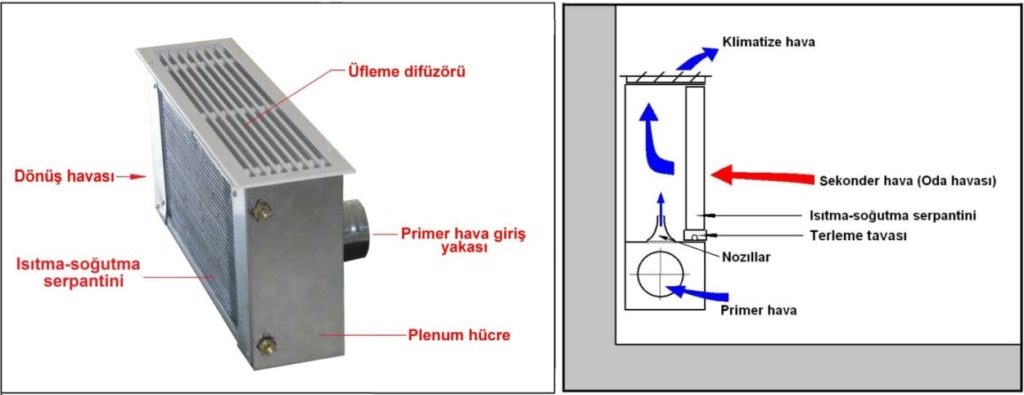
Endüksiyonlu VAV terminal üniteleri endüksiyon ünitelerinde uygulanan venturi prensibi ile klasik VAV ünitelerinin çalışma prensibinin kombinasyonu ile çalışırlar. Endüksiyonlu VAV ünitesinin şematik çizimi aşağı görülmektedir.
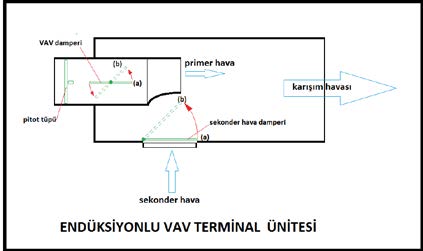
Buradaki temel prensip VAV ünitesinden gelen primer havanın plenuma püskürtülmesi neticesi yaratılan kısmi basınç düşümü ile sekonder hava tabir etiğimiz mahal havasının plenum hücre içine endüklenmesi, iki havanın karışmasının mahalle üflenmesidir.
Yukarıdaki çizimde primer hava debisi, pitot tüpü ile yapılan ölçümler paralelinde oda termostadı veya DDC panel ile kontrol edilmekte, dampere kumanda eden servomotora (çizimde gösterilmemiştir9 gerekli sinyal gönderilmektedir. VAV damperi tam açık konumda, başka bir deyişle maksimum debide iken (konum “a”) sekonder hava damperi tam kapalı konumdadır (konum “a”). Bu durumda Endüksiyonlu VAV terminal ünitesinden geçen ve mahalle sevk olunan havanın tamamı primer havadır. VAV damperinin kapama konumuna geçmeye başlaması ile, aynı servomotora bağlantı mekanizması ile bağlı olan sekonder hava damperi açmaya başlar. VAV damperi minimum konuma geldiğinde, örneğin maksimum havanın %20’sine müsaade ettiğinde (konum “b”) sekonder hava damperi tam açık konuma gelmiştir (konum “b”). Yüksek hızla üflenen primer havanın yarattığı basınç farkı neticesi sekonder hava, plenum hücre üzerindeki menfezden endüklenerek primer hava ile karışır. Primer havanın maksimum havanın %20’si civarında olduğu durumlarda dahi kendi debisinden 1,5 ila 2 kat fazla sekonder havayı endükliyebilmektedir. Bunun neticesi olarak primer hava debisinin %100 ile %20 arasında değişmesine karşılık mahalle üflenen toplam hava debisi %100 ile %50 arasında olmaktadır.
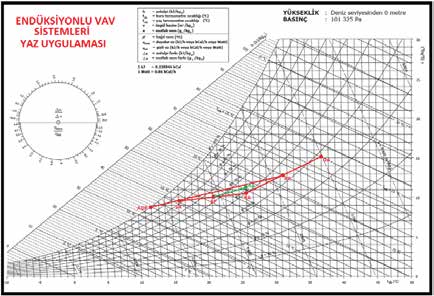
Yukarıdaki psikrometrik diyagramda %50 karışım havalı endüksiyonlu VAV sisteminin yaz uygulaması görülmektedir. Bu proses daha önce sunulmuş olan tek kanallı VAV sistemi uygulamasından görünüş olarak büyük bir farkı yok gibi görünmektedir. Ancak klasik VAV uygulamalrında “SA” konumu sabittir ve bu şartlardaki klimatize hava mahalle üflenir. Endüksiyonlu VAV sistemlerinde ise “SA” konumu VAV terminal ünitesinin plenum kutusuna sevk olunan havadır. Yalnız maksimum kapasitelerde bu şartlardaki hava mahalle sevk olunmaktadır. Kısmi yüklerde ise primer-sekonder hava karışımları meydana geldiğinden mahalle sevk olunan havanın konumu “SP”dir. Primer havanın yüzdesi maksimum primer hava debisine göre ne kadar düşük olursa “SP” noktası oda konumu olan “RA”ya o kadar yakın olur. Bu durum bize bağıl nemin kontrolunda büyük bir hassasiyet sağlamaktadır. Şöyle ki: mahalle hava hep “SA” konumunda, ancak mahal yüküne bağlı olarak değişik debilerde sevk edilmesi durumunda, mahal duyulur ısı oranının değişmesi, daha doğrusu azalması neticesi yeşil olarak gösterilen “RA” konumu daha yukarılara çıkacaktır. Çünkü kısmi yüklerde duyulur ısı kazançları büyük ölçüde azalmış olmakta, ancak gizli ısıdaki azalmalar ya hiç olmamakta veya daha düşük miktarlarda meydana gelmektedir. Bunun neticesi olarak ta oda duyulur ısı oranı düşmekte, proses çizgimiz (SA-RA hattı) dikleşmekte; “RA” konumu kuru termometre açısından sabit kalmakla birlikte daha yüksek bağıl nem oranlarına varmaktadır. Ancak endüksiyonlu VAV uygulamalarında primer-sekonder hava karışımı gerçekleştiği için üfleme noktası “SP” olmakta, oda duyulur ısı oranının aynı miktarda azalmasına rağmen bağıl nemdeki değişiklikler klasik tek kanallı VAV uygulamalarından daha az, maksimum yük için belirlenen oda şartlarına daha yakın bir konumda olmaktadır.
2.1.2.2.4. Endüksiyon Cihazları
Endüksiyonlu klima sistemleri 1950’li ve 1960’lı yılların en popüler klima sistemlerinden biriydi. Klasik tüm havalı klima ve havalandırma sistemlerine kıyasla daha düşük hava debilerine gereksinim duymaları, aynen VAV terminal üniteli sistemlerde olduğu gibi her mahallin şartlarını müstakilen ve bağımsız bir zonmuş gibi kontrol edebilmeleri nedeniyle tercih ediliyordu. Klasik tümü havalı sistemlerin uygulanmasına mimari ve yapısal özellikleri izin vermeyen yapılara daha düşük hava debi gereksinimleri ve daha küçük kanal profilleri nedeniyle kolaylıkla tatbik edilebiliyordu. Endüksiyon cihazlarının yerleştirilmesi de genellikle bina perimetresine, radyatör ve konvektör yerleştirilmesine benzer bir şekilde yapılıyordu. Endüksiyon cihazlarının önleri ve üstleri de hava giriş-çıkışına engel olmayacak bir şekilde dekoratif paneller veya ahşap doğramalarla kapatılıyordu. Hava kanalları da aynı dekoratif uygulamayla gizlenmiş oluyordu.
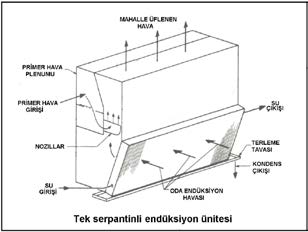
Tek serpantinli, alçak duvar montajlı bir endüksiyon cihazının izometrik çizimi aşağıda görülmektedir.
Ancak 1970’lerde baş gösteren enerji krizi, petrol fiyatına bağlı olarak aşırı derecede yükselen enerji tüketim fiyatları endüksiyon cihazı uygulamalarını negatif yönde etkiledi. Bu gelişmenin temel nedeni de eski tasarım endüksiyon cihazlarının 500 ila 750 Pa gibi yüksek giriş basınçlarına ihtiyaç göstermeleriydi. Bunun neticesi olarak ta yüksek vantilatör güçlerine gerek duyuluyordu. Buna ilaveten de üfleme nozıllarındaki yüksek üfleme hızları da göreceli olarak yüksek ses seviyeleri üretiyordu. Bu nedenlerle daha düşük vantilatör güçlerine gereksinim gösteren ve daha düşük ses seviyeli VAV (Variable Air Volume = Değişken Hava Debisi) cihazların kullanımı tercih edilmeye başlandı.
Geçen zaman içinde de endüksiyon üniteleri geliştirildi. Nozullar üzerinde yapılan Ar-Ge çalışmaları neticesi endüksiyon ünitelerinin basınç gereksinimleri 200 ila 300 Pa seviyesine indirildi. Basınç gereksinimlerinin azaltılması sonucu olarak gerekli vantilatör güçlerinde tasarrufa gidildi, ses seviyelerinde de düşüş sağlandı. Bu arada endüksiyon cihazı prensibi ile çalışan “active chilled beams”, aktif soğutmalı tavan üniteleri de geliştirildi. Bu sayede döşeme üzerine yerleştirilen endüksiyon cihazlarının son derece düşük açıklıklı asma tavanların içine veya asma tavan olmaksızın doğrudan tavana monte edilmeleri olanağı doğdu. Aktif soğutmalı tavan ünitelerinin kullanımı ile oda duyulur ısı oranı %80 veya daha yüksek olan yerlerde yoğuşmasız cihazların kullanımı gündeme geldi. Tasarımcılara problemler yaratan yoğuşma suyu drenaj borularının kullanımı da devre dışı bırakılmış oldu.
ASHRAE klasifikasyonuna göre endüksiyon sistemleriyle aktif soğutmalı tavanları kompozit sistemler, diğer bir ifade tarzıyla havalı ve sulu merkezi klima sistemleri içinde yer almaktadır. Aynı grup içinde fan-coilli klima sistemleri de yer almaktadır. Ancak gerek endüksiyon cihazlarının, gerekse aktif soğutmalı tavanların fan-coillere göre bariz üstünlükleri vardır. Bu üstünlükler de konstrüksiyonlarındaki temel farklılıklardan kaynaklanmaktadır.
Gerek endüksiyon cihazlarının, gerekse aktif soğutmalı tavanların içinde vantilatör bulunmamaktadır. Bunun yerine bünyelerinde primer havanın giriş yaptığı ve üzerinde yeteri sayıda nozul bulunan bir plenum hücre bulunmaktadır. Primer hava nozullardan yüksek hızla püskürtülmekte ve bu sayede sekonder hava olarak adlandıracağımız mahal havasının ısıtma-soğutma serpantini üzerinden endüklenmesini ve serpantin üzerinden geçerken de mevsimsel ihtiyaçlara göre ısıtılmasını veya soğutulmasını sağlamaktadır . Dolayısıyla içinde herhangi bir fan olmaksızın mahal havasını serpantin üzerinden sirküle edilmesini sağlayarak ısıtma veya soğutma ihtiyacını karşılamaktadır . Primer hava da mahallin taze hava ihtiyacını karşılamakta, istenen şartlara kadar soğutulmakta, mahal duyulur ve gizli ısı yükünün karşılanmasını da sağlamaktadır. Primer hava kanalı uygulaması olmayan fan-coilli sistemlerde mahal taze hava ihtiyacını karşılamak mümkün değildir. Ayrıca fan-coillerin oda duyulur ısı oranı paralelinde bir soğutma prosesi yapması oldukça zordur.
Endüksiyon cihazları ve aktif soğutmalı tavan ünitelerinin özelliklerini ve sistem karakteristiklerini aşağıdaki gibi özetleyebiliriz:
1. Terminal ünitelerin içinde herhangi bir vantilatör veya motor bulunmamaktadır. Bu nedenle ısıtma-soğutma serpantinin peryodik olarak basit bir temizleme işlemi haricinde herhangi bir bakıma ihtiyaç göstermezler. Bu bakım işleminin yılda bir sefer yapılması yeterlidir.
2. Isıtma-soğutma serpantinlerinin tek sıralı olması nedeniyle temizleme işlemi son derece kolaydır.
3. Endüksiyon ve aktif soğutmalı tavan üniteleri uygulamalarında yüksek hız hava kanalları, tercihan spiral kenetli yuvarlak veya “flat-oval” kanallar ve bu kanallara parallel olarak döşenmiş su boruları bulunur. Bu uygulamada klasik tümü havalı klima-havalandırma sistemleri ile VAV sistemlerine kıyasla hacımdan büyük tasarruflar sağlanır, yüksek asma tavan boşluklarına gereksinim duyulmaz.
4. Aktif soğutmalı tavan uygulamalarında, terminal ünitelerinde satıh yoğuşması olmayacağı için drenaj borusuna ihtiyaç yoktur.
5. Aktif soğutmalı tavan uygulamalarında drenaj olmadığı için soğutma serpantini konumunda herhangi bir sınırlama yoktur. Serpantin yatay olarak yerleştirilebilir. Bu sayede asma tavan içindeki boşluktan ilave tasarruf sağlanır.
6. Endüksiyon cihazlarının ve/veya endüksiyon cihazlarının duvar diplerine ve pencere önlerine yerleştirilmesi durumlarında üniteler primer hava olmaksızın tabii konveksiyonla konvektör gibi çalışıp mahallin ısı yükünü kısmen de olsa karşılarlar. Bu uygulama olanağı özellikle ofis ve benzeri mahallerde çalışma saatleri dışındaki uygulamalarda önem kazanmaktadır.
7. Yeni jenerasyon endüksiyon cihazlarıyla aktif soğutmalı tavan ünitelerinin ses seviyeleri son derece düşüktür. 26 ila 38 dB(A) arasındaki ses seviyeleri ile yatak odalarında dahi rahatlıkla kullanılabilirler.
Sistem Konsepti ve Çalışma Prensibinin İzahı
Endüksiyon üniteleri ile aktif soğutmalı tavan üniteleri venturi prensibi ile çalışır. Ünitenin bünyesinde bulunan plenum hücreye giren primer hava yüksek bir hızla nozullardan püskürtülür. Püskürtülen hava, püskürtme hızına bağlı olarak unite içinde kısmi bir vakum yaratır.
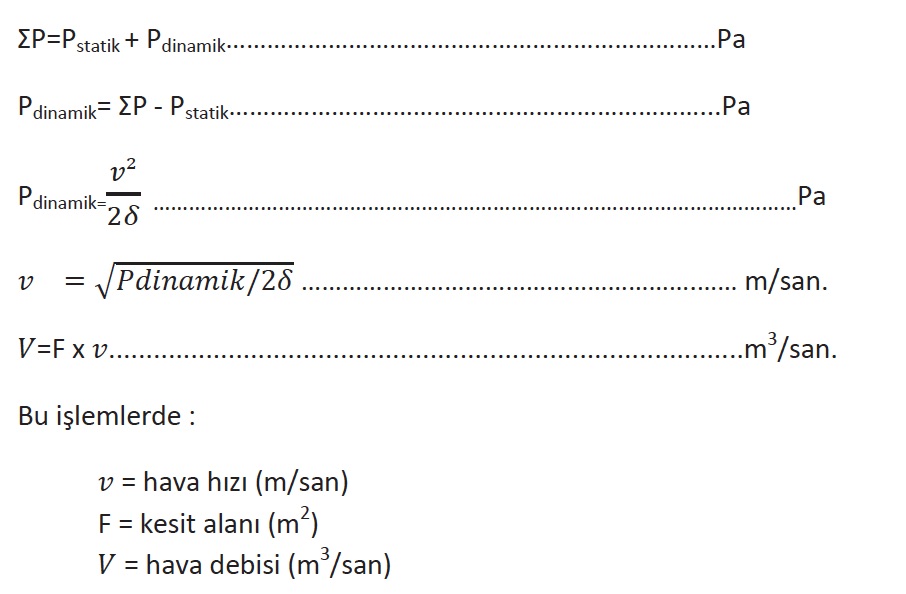
Bir mahaldeki hava basıncı statik ve dinamik hava basınçlarının toplamına eşittir. Bunu formülle şu şekilde gösterebiliriz.
∑P= Pstatik + Pdinamik= Sabit
Burada “Pdinamik” hava hızına bağlı olan basıncı göstermektedir.
Zorlanmış bir hava hareketi olmadığı, salt hava hareketinin doğal sirkülasyondan ibaret olduğu durumlarda, hızın çok düşük değerlerde olması nedeniyle dinamik basıncı sıfır kabul edebiliriz. Bu durumda mahaldeki basınç:
∑P= Pstatik olur.
Endüksiyon cihazında primer hava üfleme işlemi yapılmadığı anlarda ısıtma-soğutma serpantinin her iki tarafındaki hava basıncı eşittir ve statik basınçtan ibarettir. Plenum hücre üzerine yerleştirilmiş nozullardan, ısıtma-soğutma serpantini alnına paralel bir şekilde hava üflemeye başladığınızda cihaz içindeki toplam basınç yine sabit kalır ancak statik basıncın bir kısmı dinamik basınca dönüşür.
∑Pcihaz içi=∑Pcihaz dışı= Sabit
∑Pcihaz dışı= Pstatik dışı
∑Pcihaz içi= Pstatik cihaz içi + Pdinamik cihaz içi
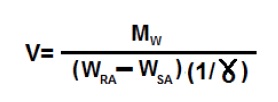
Pdinamik cihaz içi=(V2xδ)/2………………………… (Pa)
V= nozullardan üflenen havanın hızı (m/san.)
δ= havanın özgül ağırlığı (kg/m3)
Bu nedenle cihaz içinde cihaz içindeki toplam basınçta dinamik basınç kadar bir basınç düşümü sağlanır. Bu basınç düşümü nedeniyle yüksek statik basınçlı mahal tarafındaki hava ısıtma-soğutma serpantini üzerinden endüklenir. Endüklenen havanın hızı serpantin sathına sürtünme, giriş-çıkış ve benzeri kayıplar dolayısıyla azalır. Sekonder hava debisini aşağıdaki gibi formülize edebiliriz:
Vsekonder= C x Fx ((ΔPdinamik cihaz içi x 2)/δ)1/2
Serpantin üzerinden geçen bu havaya sekonder hava tabir edilir. Serpantin üzerinden geçerken mevsimsel ihtiyaçlara göre ısıtılan veya soğutulan hava primer havayla karışarak mahalle sevk olunur. Bu işlemi şematik olarak aşağıdaki çizimde görebiliriz.
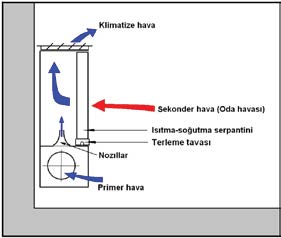
Döşeme Tipi Endüksiyon Cihazı Çalışma Prensibi
Endüksiyon cihazları konstrüksiyon ve kullanım itibariyle sabit primer ve sekonder hava debili, sabit primer-değişken sekonder hava debili, değişken primer ve sekonder hava debilidirler. Bu hususu imalat özellikleri kadar tesisat projesine bağlı olarak kullanım tarzı da belirler.
Primer ve sekonder hava debilerinin sabit olduğu endüksiyon uygulamaları en yaygın kullanım alanına sahip endüksiyon sistemleridir. Bu sistemde her iki hava debisi de sabit olduğu için değişken hava debili sistem içinde mütalaa edilmezler. Ait olduğu kategori yalnızca havalı-sulu kompozit sistemlerdir. Bu uygulamada mahallin ısıtılması ve soğutması serpantine mevsimsel ihtiyaçlar paralelinde sevk olunan sıcak veya soğuk su ile gerçekleştirilir. Mahal sıcaklığı serpantin üzerindeki motorlu vana ile sağlanır.
Primer hava debisinin sabit, sekonder hava dbisinin değişken olduğu uygulamalar 1960’lı yıllarda ABD’de en revaçta olan klima uygulamalarından biriydi. Bu uygulamada serpantinden geçen suyun debi ve sıcaklığının kontrolu yerine sekonder havanın debisi oransal bir servomotorla kumanda edilen bir damper ile yapılmaktadır. Mahal gereksinimlerine göre sekonder hava debisi regule edilmekte ve bu sayede mahallin sıcaklık kontrolu yapılmaktadır. Primer hava debisi ise sabit olup mahal taze hava ihtiyacını karşılamaktadır.
Primer ve sekonder hava debilerinin her ikisinin de değişken olduğu üçüncü uygulamada primer hava debisi mahal ısı gereksinimleri paralelinde VAV terminal ünitesi vasıtasıyla kontrol edilmektedir. Primer hava debisinin azaltılması hücre içindeki dinamik basıncı da azaltacağından aynı paralelde sekonder hava debisi de azalacak ve bu surette ısıtma veya soğutma işlemi kontrol edilmiş olacaktır. Servomotorlu vana mahal sıcaklığının kontroluna yardımcı olduğu, eğer istenirse, soğutucu batarya sathındaki yoğuşmayı da kontrol edebilmektedir. Bu işlem batarya satıh sıcaklığının mahal yoğuşma noktasından daha düşük bir sıcaklığa inmemesini sağlamak için su sıcakığını kontrol etmek tarzında olmaktadır.
Endüksiyon üniteli klima sistemlerinin sağladığı avantajları aşağıdaki gibi sıralayabiliriz. Bu avantajların bir kısmı VAV terminal ünitelerinin kullanıldığı tek kanallı değişken debili klima sistemlerinin sağladığı avantajlarla örtüşmektedir.
- Her mahallin sıcaklığı bağımsız olarak kontrol edilebilir.
- Sekonder hava ısıtma-soğutma bataryasının bağımsız olarak ısıtma veya soğutma modunda çalıştırılabilmesi (üç veya dört borulu sistemlerde) mahal kullanıcısına isteğe bağlı olarak ısıtma veya soğutmayı kullanma olanağı sağlamaktadır.
- Merkezi klima santralının büyüklüğü tüm diğer sistemlere kıyasla çok daha küçüktür.
- Nem kontrolu mahalde değil, merkezi klima santralında gerçekleşirilmektedir.
- Dış hava gereksinimi istenen seviyede karşılanabilmektedir.
- Mahallerde insan bulunmadığı, örneğin geceleri, mahallerin ısıtılması primer hava kullanılmaksızın sekonder hava ısıtma bataryası vasıtasıyla gerçekleştirilebilir. Bu durumda endüksiyon cihazı bir konvektör gibi çalışır.
- Soğutucu bataryada satıh sıcaklığının kontrolu neticesi kondansasyona mani olunması bu cihazların asma tavan içlerine dahi montajına olanak sağlamaktadır. Sekonder hava soğutucu bataryasında yoğuşma olmamasına rağmen mahal bağıl nemi belirli bir duyulur ısı oranına kadar kontrol edilebilmektedir (bu konu ileride ele alınacaktır).
Ancak tüm sistemlerde olduğu gibi bu sistemin de bazı dezavantajları vardır.
- Birçok binalarda, mimari nedenlerle endüksiyon cihazlarının kullanımı perimetrik hacimlerle sınırlıdır; iç hacimler için başka sistemlerin kullanımı gerekebilir.
- Kullanılan kontrol elemanı sayısı tümü havalı sistemlere göre daha fazladır. Ancak b u mahsur bina otomasyon sistemlerinin kullanımı ile minimuma indirilmiştir.
- Yüksek miktarlarda taze hava ve egzost gereksinimi olan mahaller, örneğin laboratuar ve benzeri hacimler için yeterli değildir. Endüksiyon cihazlarının kullanılması durumunda bağımsız havalandırma sistemleri gerekebilir.
- 4-borulu endüksiyon sistemleri ilk yatırım maliyeti itibariyle en pahalı klima sistemleridir (3-borulu ve 4-borulu sistemler bu kitabın kapsamında değildir. Ayrı bir kitapta, “Hidronik Klima Sistemleri”nde incelenecektir.)
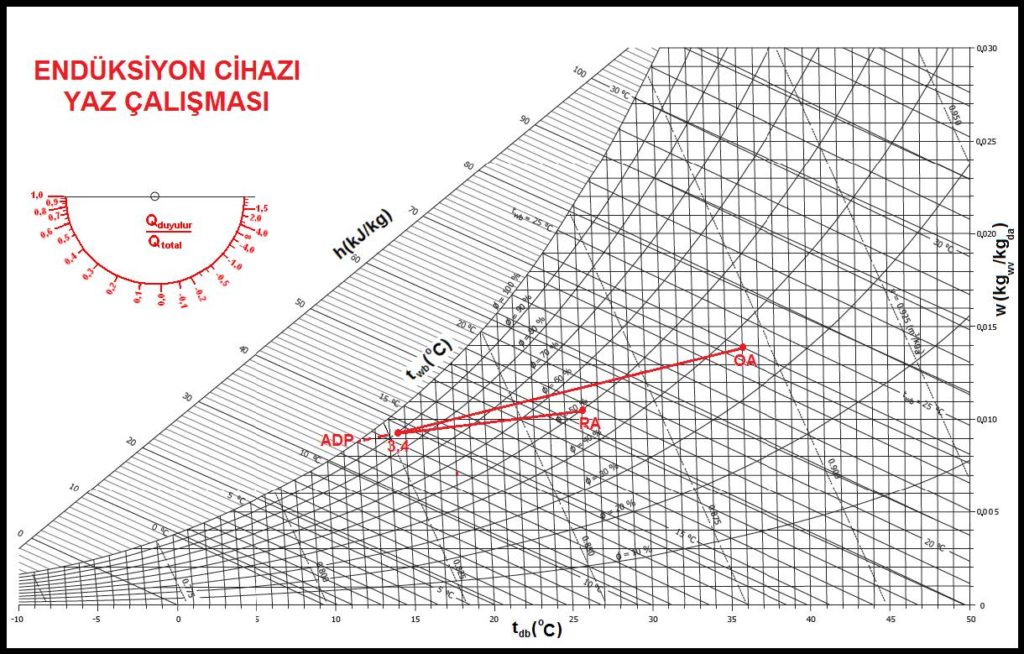
Endüksiyon cihazlı bir uygulama örneği aşağıdaki psikrometrik diyagramda gösterilmiştir.
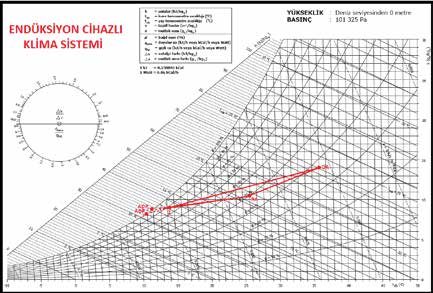
Yukarıdaki psikrometrik proseste %100 dış havadan oluşan primer hava kullanılmaktadır. “OA” şartlarındaki dış hava merkezi klima santralında “2” şartlarına kadar soğutulmakta ve endüksiyon ünitesine sevk olunmaktadır. Endüklenen sekonder hava da endüksiyon ünitesi içindeki soğutucu bataryada keza “2” şartlarına kadar soğutulmaktadır. Bu proseste primer ve sekonder hava batarya çıkış şartları eşit alınmıştır. Primer ve sekonder hava çıkış sıcaklıklarının farklı olması durumu aktif soğutmalı üniteler bahsinde ele alınacaktır.
“OA-2” prosesinin diyagram üzerindeki eğimi sistem duyulur ısı oranı“ESHR”den, “RA-2” prosesinin eğimi ise mahallin duyulur ısı oranı “RSHR”en kaynaklanmaktadır. Burada her iki prosesin ekipman çiy noktaları farklıdır. Primer hava soğutma prosesi çiy noktası “ADP1” 13oC, sekonder hava soğutma prosesi “ADP2” ise 12oC’tır. Bu farklılık dış hava kuru termometre sıcaklığı ile bağıl neminin yüksek olduğu yerlerde, mahal duyulur ısı oranı da yüksekse daha büyük olmaktadır. Bu farklılık ta primer hava ve sekonder hava soğutucu bataryalarında farklı soğuk su sıcaklıklarının kullanımını gerektirir.
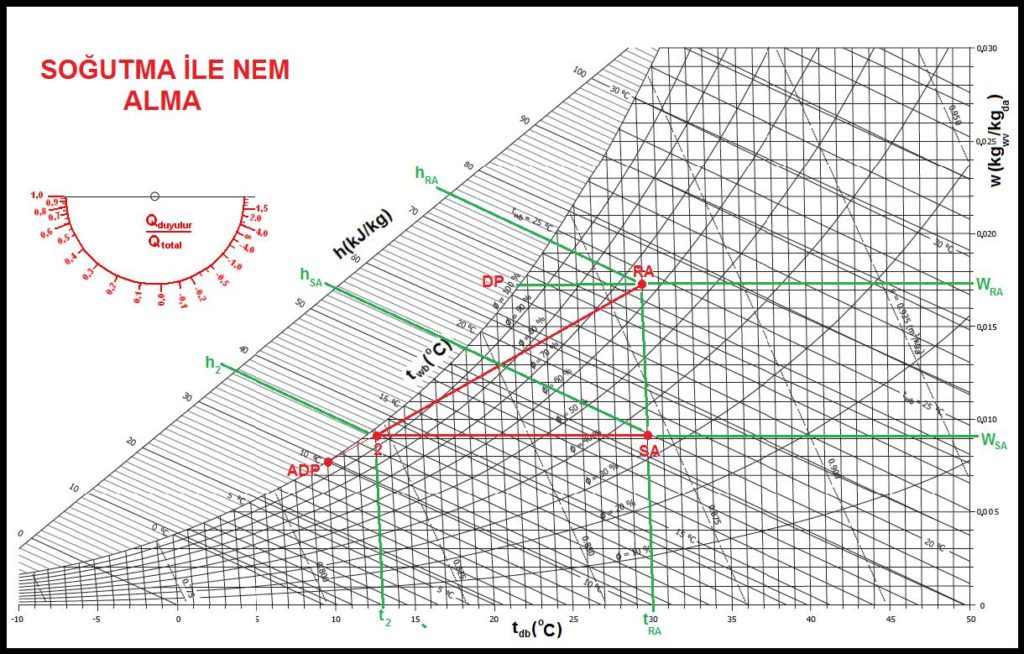
“Aktif soğutmalı tavanlar” veya diğer tanımıyla “aktif soğutmalı üniteler” konstrüksiyon olarak endüksiyon ünitelerine çok benzerler. Ancak bu ünitelerin sekonder hava bataryalarında yoğuşma planlanmadığı için bünyelerinde drenaj tavası bulunmamaktadır. Terlemenin olmayışı, bu ünitelerin tasarımına değişik ve geniş boyutlar kazandırmıştır.Aktif soğutmalı tavanlar yalnız duyulur soğutma yapmak için değil %80 ve daha yüksek mahal duyulur ısı oranlarında mahal konfor şartlarını da gerçekleştirmek için geliştirilmiş cihazlardır. Aşağıda salt duyulur soğutma prosesi görülmektedir.
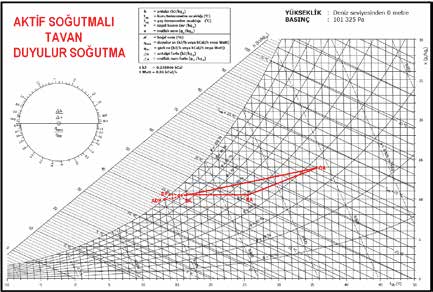
Mahal şartları (26oCKT, %50 rH) “RA”nın çiy noktası “RA”dır. Psikrometrik diyagramda bu şart 14,7oC olarak bulunmaktadır. Salt duyulur soğutma (RSHR=%100) yapabilmek için soğutucu batarya satıh sıcaklığının “RA”ya eşit veya daha yüksek olmalıdır. Bu da, soğutucu batarya karakteristiğine bağlı olmakla birlikte, soğutucu akışkan olarak kullanılan suyun dönüş suyu sıcaklığının “DP”den düşük olmaması ile gerçekleştirilir. Bu hususun kontrolu soğutucu batarya sathına yerleştirilen bir satıh termostadı ile soğutucu batarya çıkışına monte edilen bir motorlu vana ile gerçekleştirilebilir. Satıh sıcaklığının “DP”nin altına düşmesi halinde motorlu vana kapanacak, satıh sıcaklığı “DP” veya daha yüksek değerlere erişince açılacaktır. Bu arada kullanılan suyun sıcaklığı da çok önemlidir. Soğutucu akışkan giriş-çıkış sıcaklıkları ile soğutucu batarya yapım özellikleri, örneğin paralel akışlı, ters akışlı veya çapraz akışlı olması satıh sıcaklığını belirler. Eğer serpantin yapım özelliklerini tam olarak bilemiyorsak soğutucu akışkan batarya çıkış sıcaklığını “DP”ye eşit almak doğru bir tahmin ve yaklaşım olacaktır. Eğer su giriş-çıkış sıcaklık farkı “Δt” 5oC alınıyorsa su rejiminin 10-15oC alınmalıdır.Ancak bu su rejimi primer havanın “SA” şartlarına kadar soğutulması için yeterli değildir. Çünkü primer hava soğutma prosesinin cihaz çiy noktası “ADP” 13,8oC’tır.Bu nedenle, sekonder hava soğutması için öngördüğümüz yaklaşımla primer hava soğutucu akışkan su rejiminin 8/13oC veya 9/14oC olacağını kabul edebiliriz. Daha düşük su sıcaklıkları “ADP”yi daha düşük sıcaklıklara çekeceği için, primer hava toplam soğutma kapasitesi artsa da duyulur ısı kapasitesi azalacak bunun yerine gizli ısı kapasitesi artacaktır.
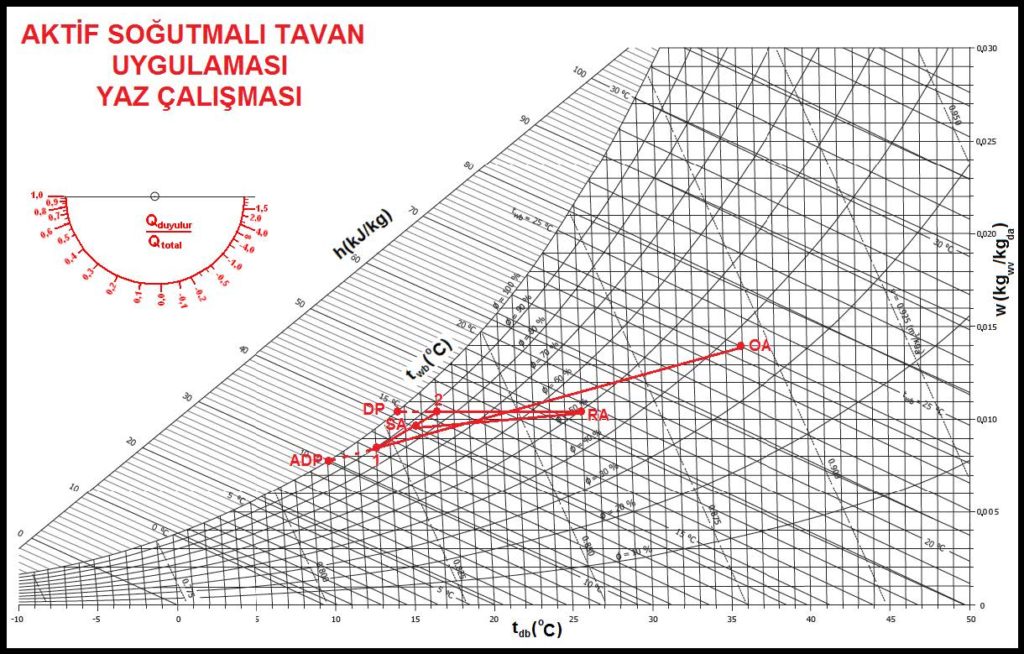
Aktif soğutmalı tavanlarla, satıh kondansasyonu olmaksızın %80 ve daha yüksek oda duyulur ısı oranlarında , bu şartlara uygun soğutma ve nem kontrol işlemini yapmak mümkündür. Bu işleme ait psikrometrik diyagramı aşağıda görülmektedir.
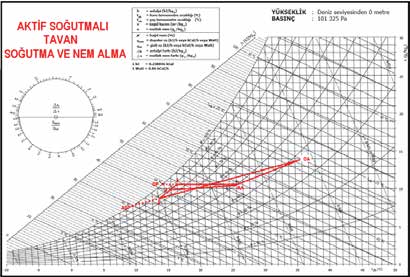
Bu uygulamada sekonder hava, yalnız duyulur ısı yükünü alacak tarzda soğutulmaktadır.Bu nedenle de sekonder hava soğutma serpantininden geçen su rejiminin giriş-çıkış sıcaklıkları serpantin satıh sıcaklığının oda çiğ noktası “DP”ye eşit veya daha yüksek olacak tarzda seçilmesi gerekmektedir. Sekonder havanın soğutulma işlemi “RA-1” hattı ile gösterilmektedir. Klima santralında soğutulan havada ise bu şart aranmamaktadır. “3” noktasının temini için gerekli “2” noktasının belirlenmesi, “OA-2” primer hava soğutma işleminin gerçekleştirilebilmesi için cihaz çiğ noktası ADP’ye eşit veya daha düşük bir satıh sıcaklığının gerçekleştirilmesi gerekmektedir. ADP 10oC olduğuna göre kullanılması gereken soğutucu su rejimi de 6/10oC veya daha düşük sıcaklıkta olmalıdır. Bu sayede “2” noktasında primer hava çıkışı sağlanacak, “1” noktasında serpantinden çıkan sekonder hava ile karışım neticesi 15.3oCKT olan “3” noktası elde edilecektir.
Burada dikkat edilmesi gereken çok önemli bir husus vardır. Cihazdan çıkan toplam hava debisinin yaklaşık 1/3’ü primer hava, 2/3’ü ise sekonder havadır. Primer-sekonder hava karışım noktasını belirlerken bu husus muhakkak dikkate alınmalıdır. “3-RA” proses çizgisi mahaldeki ısınma ve nem alma işlemidir.Bu işlemin psikrometrik diyagram üzerindeki eğimini mahal duyulur ısı oranı (RSHR) belirler. Bizim yukarıdaki örneğimizde bu değer %80 olarak alınmıştır. Daha düşük primer hava sevk sıcaklıkları daha düşük soğutucu su rejimini gerektireceği için sistem tasarımı için oldukça risklidir ve maliyet arttırıcı bir unsurdur. Bu nedenle RSHF %80’den daha düşük olan uygulamalarda aktif soğutmalı tavan üniteleri yerine endüksiyon cihazları seçilmelidir.
Değişken debili, tek bataryalı bir endüksiyon sistemindeprimer hava debisi, endüksiyon ünitesinin primer hava girişine monte edilen bir VAV terminal ünitesi ile gerçekleştirilir. Bu ünite yaz-kış değişken hava debili veya yaz değişken, kış sabit minimum debide çalışabilir. Her iki durumda da odaya monte edilen elektronik termostat yaz kış değişimini otomatik olarak yapacaktır. Aynı termostatın endüksiyon cihazı üzerindeki soğutma-ısıtma müşterek bataryanın motorlu vanasına da kumanda etmesi gerekmektedir.
Endüksiyon cihazlarının girişlerinde VAV terminal ünitelerinin bulunması üfleme ve dönüş hava kanallarındaki hava debilerinin değişken olmasını gerektirir. Bunun için vantilatör üfleme kanalında basınç sensörü “P” bulunmaktadır. VAV ünitelerinin hava debisini azaltmaları durumunda üfleme kanalındaki hava basıncı yükselme tandansı gösterecektir. Bu durum “P” tarafından algılanacak ve vantilatörün motoruna kumanda eden frekans konvertörü “F/Q”ne iletilecektir. Bu sinyal neticesi “F/Q” vantilatör devrini istenen basınç seviyesine gelininceye kadar azaltacaktır. VAV terminal ünitelerinin fazla havaya gerek duymaları durumunda da kanaldaki toplam hava basıncı düşme tandansı göstereceğinden frekans konvertörü “F/Q” vantilatör devrini istenen basınç seviyesi elde edilinceye kadar yükseltecektir. Aspiratörde de bir frekans konvertörü “F/Q” bulunmaktadır. Bu konvertör vantilatör frekans konvertörü ile asil-köle olarak çalışmaktadır.
Klima santralının görevi iki türlü ifade edilebilir. Bu görev tasarımcı tarafından belirlenmelidir:
- Yaz ve kış uygulamalarında değişik üfleme sıcaklıkları. Ancak bu sıcaklıklar uygulama sırasınca sabit kalacaktır.
- Yaz ve kış üfleme sıcaklıklarında dış hava sıcaklığına bağlı olarak üfleme sıcaklığı kompanzasyonu. Bu durumda, örneğin yaz uygulamasında dış hava sıcaklığı projede öngörülen ve hesaplara esas alınan maksimum sıcaklıkta iken primer hava minimum dizayn sıcaklığında, örneğin 14oC’ta üflenecektir. Dış hava sıcaklığı ile mahal dizayn sıcaklığı arasındaki fark azaldıkça da üfleme sıcaklığı mahal sıcaklığına yaklaşacaktır. Mahallin herhangi bir ısıtma ihtiyacı olmaması durumunda, özellikle yaz-kış geçiş dönemlerinde primer hava oda sıcaklığında üflenecektir. Kış uygulamasında ise yaz uygulamasının tersi yapılacaktır.
Örnek diyagramda plakalı eşanjörlü ısı geri kazanım ünitesi gösterilmiştir. Bu ünite yerine döner tamburlu ısı geri kazanım cihazı veya ısı borusu “heat pipe” kullanılabileceği gibi her hangibir ısı geri kazanım aparatı kullanılmadan da sistem çözülebilir. Ancak enerji ve işletme ekonomileri göz önünde bulundurularak ısı geri kazanım cihazı kullanılması tavsiye edilir.
2.1.3. Çift Kanallı Sistemler
Çift kanallı değişken hava debili klima sistemleri çok zonlu bina uygulamalarına ihtiyaç gösteren mimari yapılarda kullanılmaktadır. Zonlarda meydana gelebilen ani yük değişikliklerine kolaylıkla adapta olabilme yeteneğine sahiptir. Çift kanallı sistemler, tek kanallı VAV uygulamalarına kıyasla daha yüksek ilk tesis maliyetine sahip olmalarına rağmen özellikle ABD’de yaygın bir kullanım alanına sahiptirler. Bu sistemde mahallere sıcak ve soğuk hava iki paralel hava kanalı ile sevk olunmakta, mahal ihtiyacına göre belirli oranlarda karıştırılarak mahalle üflenmektedir.
Bu sistemde merkezi klima santralında şartlandırılan hava iki ayrı ve birbirine paralel hava kanalı ile sevk olunur. Kanallardan biri soğutulmuş havayı, diğeri
ise ısıtılmış havayı taşımakta kullanılır. Havanın şartlandırılması ve sevki tek fanlı ve iki fanlı olarak iki değişik tarzda yapılır. Bunlarla ilgili akış diyagramları aşağıda görülmektedir.
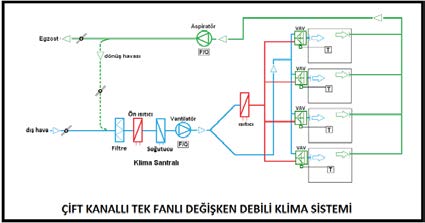
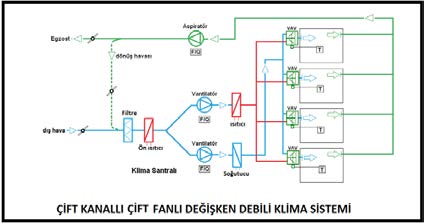
Her iki uygulamada da birer adet ön ısıtıcı görülmektedir. Bu bataryanın görevi donma tehlikesini önlemektir. %100 Dış hava veya karışım havası ile çalışan
klima santrallarında, kış çalışması minimum debi ile olsa dahi soğutucu bataryaya giren hava sıcaklığını donmayı önleyecek bir sıcaklığın üzerinde tutabilmektir. Donma termostatlarının hassasiyetini dikkate aldığımızda bu sıcaklığın 4oC’ın üzerinde olması gerektiğini söyleyebiliriz.
Çift kanallı, çift fanlı sistemlerde eski uygulamalarda fanların debilerini belirlemek sorun yaratabiliyordu. Bunu gidermek için genelde tek fanlı sistemler uygulanıyorsu. Ancak günümüze frekans konvertörlerinin kullanımının yaygınlaşmasıyla bu sorun tamamen çözülmüştür. Çift fanlı uygulamalarda her fanın debisinin toplam hava debisinin %70’ine eşit almak genelde yeterli olmaktadır. Debinin fazla gelmesi, örneğin o miktarda sıcak havaya ihtiyaç olmaması durumunda, ki bu durum çift kanallı VAV terminal ünitelerinin sıcak hava debisini azaltması sonucu sıcak hava üfleme kanalında toplam hava basıncının artması ile kendini belli eder, frekans konvertörü DDc veya BMS’den aldığı kumanda sinyalleri paralelinde fanın devrini, dolayısıyla debisini istenen basınç seviyesine ulaşılıncaya kadar azaltır.
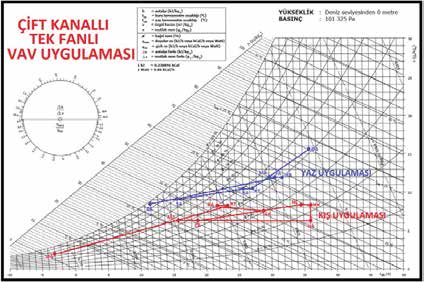
Basit bir çift kanallı VAV sistemine ait yaz ve kış prosesleri yukarıdaki psikrometrik diyagramda görülmektedir. Mavi çizgilerle gösterilen yaz klima prosesinde “RA” mahal şartlarını, “OA” dış hava şartlarını göstermektedir. “RA-RT” hattı dönüş havasının kanallarda ve aspiratör motorundan kaynaklanan ısı kazancını göstermektedir. Isınan “RA” klima santralına “RT” şartlarında varır ve dış hava “OA” ile belirlenen oranda karışır. “MA” iki havanın karışım şartlarını göstermektedir. Yaz uygulamasında, genelde sıcak havanın ısıtılması gerekmemektedir. Çünkü karışım havası vantilatörün motorundan az da olsa belirli bir ısı kazanmakta, “FA” konumuna, bilahare kanalda kazandığı ısı ile “HA” konumuna varmaktadır. “HA” şartı bizim çift kanallı VAV terminal ünitesine sevk ettiğimiz sıcak havadır. “FA” şartlarında vantilatörden sevk olunan hava soğutucu bataryada “CA” şartlarına kadar soğutulur.Bu hava bizim çift kanallı sistemde VAV terminal ünitesine sevk ettiğimiz soğuk havadır. Diyagramda karışıklık olmaması için “ADP” noktası gösterilmemiştir. “ADP” noktasının yaklaşık 11oC olduğu bu nedenle soğutucu suyun 6/11oC olması kabul edilebilir. “HA” şartlarındaki sıcak hava ile “CA” şartlarındaki soğuk hava çift kanallı VAV ünitesinde mahal ihtiyaçları paralelinde karıştırılarak mahalle üflenir. Mahalle üflenen havanın karışım prosesi “CA-HA” hattı üzerinde oluşur. Karışım noktası “SA” ile gösterilmiştir. “SA-RA” prosesi ise mahal duyulur ısı oranına bağlı olarak mahalde ısınma ve nem kazanma işlemidir.
Kış prosesi de yaz uygulamasına benzerlik göstermektedir. “RA” mahal havası dönüş kanalında ve aspiratör motorundan ısı kazanarak “RT” şartına gelmekte ve belirli bir oranda dış hava “OA” ile karışmaktadır. “MA” karışım noktasındaki hava çok az miktarda ısıtılır . Vantilatör motorundan kaynaklanan ısı kazancıyla birlikte vardığı nokta “CA”dır. Psikrometrik diyagramda gösterilen “CA” kuru termometre sıcaklığından daha düşük bir sıcaklık isteniyorsa dış hava oranını arttırmak tercih edilmelidir. Sıcak hava, mahal ısı kaybını karşılacak tarzda “HA” noktasına kadar ısıtılır, buharlı nemlendirici ile “HH” noktasına kadar nemlendirilir. Sıcak hava, kanal içinde belirli miktarda ısı kaybedecek ve “HC” noktasına kadar soğuyacaktır. Bu nokta bizim VAV terminal ünitesine sevk ettiğimiz sıcak havadır. Bu hava “CA” konumundaki soğuk hava ile “CA-HC” hattı üzerinde karışarak “SA” noktasında mahalle üflenir. “SA-RA” hattı mahalde ısı kaybı nedeniyle soğuma ancak bu esnada da dahili kazançlar nedeniyle nemlenme işlemidir.
2.1.3.1. Sabit Debili Uygulamalar
Çift kanallı VAV uygulamalarının tümünde hava kanallarındaki debi değişkendir. Mevsimsel ihtiyaçlara göre sıcak veya soğuk hava debisi arttırılır veya azaltılır. Ancak VAV terminal ünitesinde karıştırıldıktan sonra mahalle üflenen hava sabit debide olabilir. Bu uygulamada mevsimsel ihtiyaçlara ve/veya mahal şartlarına bağlı olarak bir havanın debisi azaltılırken diğer havanın debisi arttırılır. Bu uygulamada sıcak hava debisi ve soğuk hava debisinin toplamı eşittir veya eşite çok yakındır. Bu uygulamada tek fanlı sistemler uygulanabileceği gibi vantilatör ve aspiratör için frekans konvertörü kullanılmayabilir.
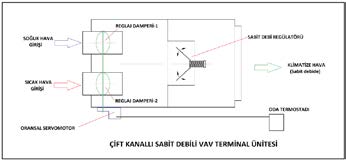
Gerekli karışım sıcaklığı, mahal termostatından gelen sinyaller paralelinde sıcak ve soğuk havanın değişen oranlarda karıştırılması suretiyle yapılacaktır. Mahalle sevk olunan karışım havası debisi sabittir ve bu debi “sabit debi regülatörü” olarak adlandırdığımız bir sabit debi kontrol ünitesi “CAV” ile gerçekleştirilmektedir. Bu nedenle sabit debili VAV terminal ünitelerinin girişlerinde pitot tüpü kullanılmayabilir. CAV üniteleri sabit debiye kalibre edilmiş tek kanallı klasik VAV terminal üniteleri olabileceği gibi mekanik debi ayar üniteleri de olabilir.
2.1.3.2. Sabit Debi Üniteleri
Sabit debi reglaj ünitesi olarak tek kanallı VAV terminal ünitelerinin nasıl kalibre edileceği 2.1.1.2 no’lu konuda anlatılmaktadır. Kalibrasyon esnasında “Vmin”ve “Vmax” değerleri birbirine eşit olarak yüklenirse VAV terminal ünitesi 2-10VDC kumanda sinyallerinde sabit debili bir CAV ünitesi olarak çalışacaktır. 0 VDC kumanda da ise tam kapalı konumuna geçecektir.
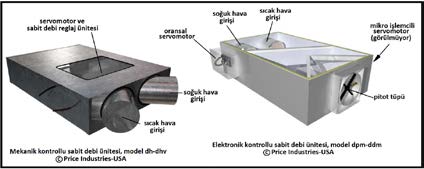
Mekanik CAV üniteleri ise bu işlemi mekanik donanımları ile gerçekleştirmektedir. Aşağıdaki fotoğrafta daireselkesitli b ir mekanik debi reglaj ünitesi aynı resmin yanındaki çizimde ise ünitenin temel elemanları görülmektedir.
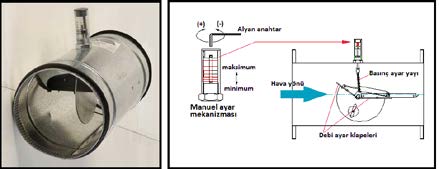
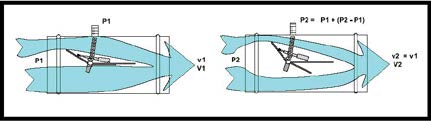
Bu sistemin temel prensibi dinamik basıncın sabit tutulmasıdır. Aşağıdaki şekilde belirli bir dairesel kesitten “V1” debisinde geçen hava görülmektedir. Bu debinin hızı “v1” olup bu hızın da karşıtı olan dinamik basınç “P1”dir. Mekanik debi reglaj ünitesinin üstünde manuel bir ayar mekanizması bulunmaktadır. Bu mekanizma üzerine değişik debi değerleri yazılmıştır. Alyan anahtarı vasıtasıyla istediğiniz debiye göre üniteyi ayarladığınızda mekanizma basınç ayar yayında “P1” değerine eşit bir yay kuvveti yaratacaktır. Eğer hava hızı “v1” değerinde ise debi ayar klapesinde hiçbir değişiklik olmayacaktır. Hava hızı “v2”ye yükseldiğinde P2>P1 olduğundan artan dinamik basınç nedeniyle klape saat yönünde hareket ederek kesiti daraltacak, basınç ayar yayının gerilimi de “P2=P1+(P2-P1)”e yükselecektir. Direnç ve dolayısıyla kayıpların afrtması neticesi hava hızı “v2”den “v1”e düşmüş, debi de “V1”de sabit kalmış olacaktır.
2.1.3.3. Değişken Debili Uygulamalar
Değişken debili çift kanallı VAV terminal üniteleri iki ayrı dairesel kesitli VAV terminal ünitesinden meydana gelmektedir. Bu ünitelerden biri sıcak hava kanalıyla irtibatlı olan yakaya, diğeri de soğuk hava kanalına bağlı olan yakaya irtibatlandırılmıştır. Her iki VAV ünitesi DKP veya galvaniz sactan mamul tek bir gövde içinde yer almaktadır. Bu ünitenin de çıkışına susturucu, hava dağıtımı için plenum hücre monte etmek mümkündür. Bu ünitelerin kalibrasyonları birbirinin tersi olarak yapılmaktadır. Bu husus aşağıdaki çalışma senaryolarında daha iyi anlaşılmaktadır.
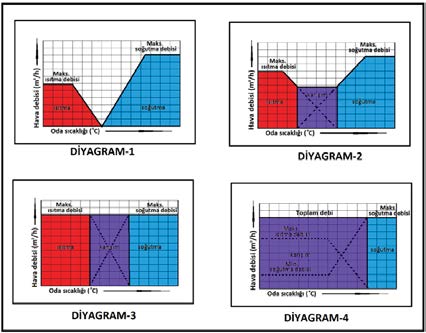
Diyagram-1’de görülen uygulama en basit çift kanallı değişken debili klima sistemi uygulamasıdır. Bu uygulamada soğuk havayı kontrol eden VAV birimi soğutmaya ihtiyaç duyulduğu süre zarfında çalışmakta, sıcak hava üzerindeki VAV birimi ise kapalı konumda bulunmaktadır. Soğuk hava debisi, tek kanallı VAV uygulamalarında olduğu gibi mahal ihtiyaçları paralelinde debiyi oransal olarak regüle etmektedir. Soğuk hava debisinin minimum (veya sıfır) olduğu konum yaz-kış değişim sıcaklığı olup bu noktadan itibaren sıcak hava debisi devreye girmekte mahal sıcaklığına bağlı olarak debi reglajı yapmaktadır. Sıcak ve soğuk hava VAV birimleri aynı aynı çalışmamakta, biri çalışırken diğeri sıfır konumunda bulunmaktadır. Bu sistemin en büyük eksikliği mahallin soğutma veya ısıtma ihtiyacı minimuma inmesiyle birlikte mahalle üflenen hava debiside minimuma inmekte ve sıfırlanmaktadır. Bu mahsur diyagram-2’de gösterilen uygulama ile kısmen giderilmektedir. Burada minimum bir debi kabul edilmiş ve bu debinin altına düşülmemesi öngörülmüştür. Maksimum soğutma debisinde mahal ihtiyaçlarının azalması neticesi düşüş izlenecektir. Ancak bu düşüş sonunda varılacak değer önceden belirlenen bir değerin altına indiğinde soğutma havasını regüle eden VAV birimi devreye girerek eksilmekte olan hava debisini karşılayacaktır. Diyagramda “karışım” olarak gösterilen bu bölge yaz-kış geçiş bölgesidir. Diyagram-1 ve diyagram-2’deki uygulamalarda maksimum sıcak hava debisi, işletme ekonomisi nedeniyle maksimum soğuk hava debisinden düşük tutulmuştur.
Diyagram-3’te sistemin devamlı olarak sabit debide çalışması öngörülmektedir. Bu uygulama bir açıdan sabit debili, çift kanallı VAV uygulamsıdır. Ancak burada kumandalar her bir VAV birimi üzerindeki pitot tüplü ölçme istasyonu ve mikro işlemcili servomotor tarafından bağımsız ancak birbiri ile senkromeşli olarak yapılmaktadır. Soğutma uygulamalarındaki maksimum debinin 10VDC kumanda sinyaline tekabül ettiğini kabul edersek (sistem çalışması 0-10VDC) debi düşmesi 10VDC’nin altındaki bir sinyalle sağlanacağı için bu sinyalin sıcak hava VAV birimince algılanması neticesi azalan soğuk hava debisi sıcak hava VAV birimince karşılanacaktır. Bu uygulama sayesinde hem mahallin ısı ihtiyacı karşılanmış olacak hem de hava debisinde bir azalma olmayacağı için pozitif vantilasyondan bir fedakarlık yapılmamış olacaktır. Soğuk hava debisinde azalmanın başladığı nokta ile sıcak hava debisinin maksimuma eriştiği nokta arası karışım havasının mahalle sevk edildiği süredir. Bunun dışında yalnız soğutma havası (mavi renk) veya yalnız ısıtma havası (kırmızı renk) sevk olunacak, ünite içinde herhangi bir karışım olmayacaktır.
Diyagram-4’de soğutma prosesi için gerekli maksimum debi mahal havalandırması için gerekli sabit debi olarak kabul edilmektedir. Soğutma sezonu uygulamasında maksimum soğutma yükünün olduğu durumlarda gerekli havanın tümü soğutma VAV birimi ile karşılanacaktır. Ancak soğuk hava debisinin azalmaya başlaması durumunda eksilen debi sıcak hava debisiyle telafi edilecektir. Isıtma sezonu boyunca tüm uygulama karışım havası tarzında olmaktadır.
Bu proseslerin tümünde soğuk ve sıcak hava sıcaklıkları için sayfa-63’deki psikrometrik diyagrama bakmaları önerilir. Bu diyagramda yaz ve kış çalışmaları ayrı ayrı gösterilmiştir.
Bu uygulamalar içinde en yaygın uygulama alanı bulan diyagram-2’deki uygulamadır. Bu uygulamada havalandırma hiçbir zaman durdurulmamakta, geçiş döneminde pozitif havalandırma için gerekli olan debi karışım havası olarak mahalle sevk edilmektdir.
- VAV Uygulamalarında Klima Santralları ve Otomatik Kontrol
- Terminal Ünitesi Kontrol Sistemleri
2.1.1.3 No’lu konuda “VAV Terminal Ünitelerinin Kontrolu” başlığı altında bir VAV terminal ünitesinin görevlerinden, debi reglaj sistemlerinin otomatik kontrolunndan özet olarak bahsedilmiş, günümüzde ve ülkemizde en yaygın uygulama şekli olan elektronik kontrollu servomootorların kalibrasyon, çalışma tarzı ile şantiyede debi ayarlarının değiştirilebilme olasılıkları anlatılmıştı. Şimdiki konumuzda ise VAV ünitelerine uygulanmakta olan değişik kumanda sistemlerinden bahsedeceğiz. Günümüzde VAV terminal ünitelerine üç değişik otomatik kontrol sistemi uygulanmaktadır. Bu sistemler şunlardır:
- Pnömatik kontrol
- Elektronik kontrol
- DDC ve BMS kontrol
2.2.1.1. Pnömatik Kontrol
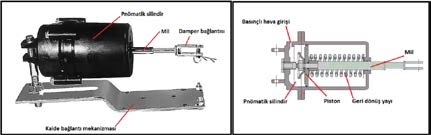
Pnömatikolarak kumanda edilenbir VAV terminal ünitesinde hava debisini oransal olarak kontrol edebilen pnömatik bir servomotor bulunmaktadır. Servomotor, bir pnömatik silindir, silindir içinde iki yönlü hareket edebilen bir piston ve pistona bağlı bir mil ile geri dönüşü sağlayan bir yay donanımından ibarettir. Silindiere gelen basınçlı havanın piston üzerinde yarattığı kuvvet yayın gücünü yenerek milin ileri doğru hareket ettirerek debi reglaj damperinin açılmasını sağlar. Hava basıncının piston üzerine tatbik ettiği kuvvet yay gücüne eşit olduğunda damper durağan duruma geçer ve o konumda kalır. Basıncın azalmasıyla da yay pistonu geri itip damperin kapanmaya başlamasını sağlar.
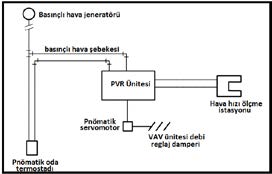
Sistemin kontrol merkezi“Pnömatik Debi Regülatörü” denilen bağımsız bir regülatördür. Bu ünite İngilizce tanımının baş harflerinden meydana gelen “PVR” kodu ile tanınmaktadır. Bu ünite hava hızı ölçme ünitesine (pitot tüpü, orifis veya venturi metre) ve pnömatik mahal termostadına basınçlı havayı taşıyan borular (genelde bakır borular) ile bağlıdır. Termostat mahal sıcaklığı ile ilgili bilgileri regülatöre pnömatik olarak ilettiğinde regülatör istenen havayı temin edene kadar servomotora “aç” veya “kapa” komutu gönderir. Hava hızı ölçme istasyonunda istenen debi okunup PVR’ye bildirilince damperin statik konuma geçmesi sağlanır. PVR ve mahal termostadı üzerindeki tüm ayarlar manuel olarak yapılır. Sistemin çalışması için nemi alınmış basınçlı hava gereklidir.
Pnömatik kumanda sistemleri ABD’de VAV terminal ünitelerinde yaygın olarak kullanılmaktadır.
2.2.1.2. Elektronik Kontrol
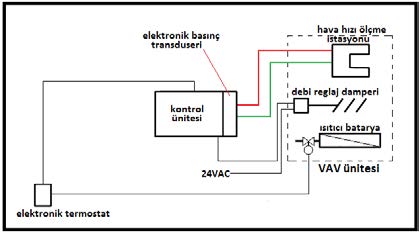
VAV terminal ünitelerinde kullanılan elektronik kontrol sistemlerinde debi reglajı oransal bir elektronik servomotor ile yapılmaktadır. Servomotor iki yöne, saat ve saatin aksi yönüne hareket edebilmekte olup içinde yay geri dönüş mekanizması yoktur. Açma ve kapama işlemleri motorun dönüş yönünün otomatik olarak belirlenmesi ile yapılmaktadır. Elektronik servomotorlar 2VAC akım ile çalışırlar. Servomotorun, dolayısıyle debi reglaj damperinin konumu elektronik kontrol ünitesinden gelen 0-10VDC, 2-10VDC gibi sinyallerle gerçekleştirilir. Elektronik kontrol sisteminin beyni sayılabilecek kontrol ünitesi elektronik mahal termostadına ve hava hızı ölçme istasyonuna bağlıdır. Termostat mahal sıcaklığı ölçer ve kontrol ünitesine bildirir. Aynı zamanda mahal sıcaklığındaki değişimi de izleyerek yaz-kış konumu değişimini de kontrol ünitesine bildirir. Hız ölçme istasyonu toplamhava basıncı ile statik hava basıncını pnömatik olarak algılar, ince plastik veya bakır borularla kontrol ünitesine bildirir. Genelde kontrol ünitesi içinde bulunan elektronik basınç transduseri gelen pnömatik sinyalleri ana birime bildirir ve bu sinyallerin elektronik mahal termostadından gelen sinyallerle karşılaştırılmasını sağlar. Elektronik basınç transduseri basınç bağımsız bir ünitedir. Şu ana kadar bahsettiğimiz sistem bağımsız “üniter” elektronik kontrollu VAV terminal ünitesi kontrol sistemidir.
Günümüz uygulamalarında VAV kontrol sistemlerini üreten ve OEM malzeme olarak VAV üreticilerine veren firmalar kontrol ünitesi, elektronik basınç transduseri ve oransal servomotoru tek gövde içinde birleştirmişlerdir. Dolayısıyla 2.1.1.3 numaralı bahiste anlatıldığı gibi debi ölçüm ünitesinden gelen pnömatik sinyaller, elektronik termostat veya DDC panellerden gelen kumanda sinyalleri servomotor gövdesine bağlanmaktadır. Bu nedenle günümüzün VAV servomotorları mikro bilgi-işlemcili oransal servomotorlara dönüşmüşlerdir.
VAV terminal ünitelerinin çıkışlarına ısıtıcı batarya konulması oldukça yaygın bir uygulamadır, genellikle yaz değişken, kış sabit “minimum” debili uygulamalarda rastlanır. Böyle bir uygulamada ısıtıcı bataryanın kontrolu VAV kontrol ünitesinden bağımsız olarak, bu işleme uygun bir elektronik oda termostadı ile yapılır. Bu konu ileride detaylı bir ele alınacaktır.
2.2.1.3. DDC ve BMS Kontrol
DDC (Dijital kontrollu sistemler) ve BMS (Bina otomasyon sistemleri) otomatik kontrol uygulamalarında kullanılan debi reglaj üniteleri elektronik kontrol sistemlerinde kullanılanların aynıdır. Temel farklılık dijital kontrollu sistemler kendi bünyelerinde bir mikro bilgi işlemci bulundurmakta ve bu üniteyi bilgi depolama, gerekli kumanda sinyallerini üretme ve gönderme, durumuna göre konum vekomut değiştirme işlemleri için kullanabilmektedir. Bu sistemde VAV ünitelerine doğrudan kumanda sinyalleri gönderen elektronik oda termostatlarının yerlerini çok daha basit ve ucuz olan elektronik hissediciler “sensörler” almaktadır. VAV terminal ünitelerine, ünite çıkışlarındaki ısıtıcı bataryalara komut sinyalleri BMS’den gelmektedir.
Böyle bir uygulamaya üniter elektronik kontrol sistemleriyle mümkün olmayan kompleks senaryolar yazmak mümkündür. Tüm üniteler, merkezi klima santralı, soğuk su üretici grup, sıcak su üretim ünitesi tek merkezden kontrol edilebilmektedir. BMS’in ana bilgisayar monitöründe her VAV ünitesinin hava debisi, damper konumu, mahal sıcaklığı gibi bilgileri görmek, gerektiğinde müdahele etmek mümkün olmaktadır.
Günümüzde üretilen tüm elektronik kontrollu VAV servomotorları kontrol ünitesi ve elektronik basınç transduseri ile bir bütün olarak tek gövde halinde üretilmektedir.Bölüm 2.1.1.3’de verilen BELİMO NMV-02 servomotoruna ait bağlantı şemasını tekrar sunuyoruz. Bu bağlantıda servomotorun hareketi için gerekli olan 24VAC cereyan BMS dışındaki bir gerilim şebekesinden temin edilmektedir. Mahal sıcaklık veya ayar sinyali ise direkt BMS’den gelmektedir. Mahal sıcaklık hissedici elemanı bina otomasyon sistemi BMS’e bağlı olup
sinyallerini buraya göndermekte, BMS de önceden yüklenmiş yazılıma göre VAV servomotoruna kumanda sinyali göndermektedir. NMV-02 salt bir servomotor olmayıp,mikro işlemcili kontrol ünitesini ve elektronik basınç tarnsduserini bünyesinde bulundurmaktadır.
Aşağıdaki resimde de bir BELİMO kompakt mikro-işlemcili VAV servomotoru görülmektedir.
2.2.2. Terminal Ünitesi Kontrol Çeşitleri
VAV terminal ünitelerinde kullanılan otomatik kontrol sistemleri “Basınç Bağımlı” ve “Basınç Bağımsız” olarak iki ana başlık altında toplanmaktadır. Bu iki başlık aynı zamanda VAV sistemlerinde uygulanmakta olan birbirinden farklı iki temel felsefeyi oluşturur.
2.2.2.1. Basınç Bağımlı Kontrol Sistemleri
Basınç bağımlı uygulamalarda mahal termostadı doğrudan oransal servomotor motoru vasıtasıyla debi reglaj damperinin konumunu belirler. Bu durumda debi ölçümü yapılmadığı için sevk olunan hava debisi damper konumu ile VAV ünitesine giren hava basıncının bir fonksiyonudur. Havanın gerekenden az veya fazla gelmesi durumunda mahal termostadı devamlı olarak damper konumuna müdahale eder ve düzeltmeye çalışır. Bu uygulamada mahal sıcaklığında devamlı oynamalar meydana gelecektir. Oransal kontrol bandının geniş tutulması bu durumu kısmen giderir. Oransal bandın dar, örneğin ±2oC gibi tutulması durumda ise oda sıcaklığında gittikçe büyüyen dalgalanmalar meydana gelebilir, “control hunting” dediğimiz, arzu edilmeyen durum gerçekleşebilir.
2.2.2.2. Basınç Bağımsız Kontrol Sistemleri
Basınç bağımsız uygulamalarda mahal termostadı doğrudan mahalle sabit sıcaklıkta sevk olunan havanın debisini belirler, kontrol eder. Debi reglajı termostattan gelen sinyaller paralelinde debi ölçüm ünitesi (genelde pitot tüpü) ve burada ölçülen hava hızının pnömatik kumandalı sistemlerde pnömatik debi regülatörü “PVR”, elektronik ve DDC sistemlerde elektronik basınç transduseri ve kontrol ünitesi tarafından değerlendirilip damper konumunun debi kontrollu olarak kontrolu ile gerçekleştirilir. Bu uygulamada debi regülasyonu damper ile yapıldığı için sistem kanaldaki hava basıncından bağımsız olarak çalışır. Bu nedenle basınç farklılıkları debide büyük oynamalara, dolayısıyla mahal sıcaklığında büyük dalgalanmalara neden olmaz.
Basınç bağımsız kontrol sistemleri VAV terminal ünitelerinde en çok kullanılan sitemler olup bu sayede maksimum ve minimum hava debilerinin ayarı mümkün olmaktadır.
2.2.3. Klima Santralı Kontrol Sistemleri
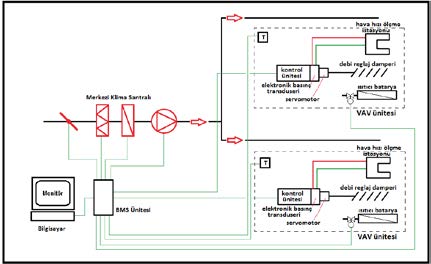
Değişken debili klima sistemlerinin otomasyununda merkezi klima santralarının otomatik kontrolu VAV terminal ünitelerinin otomatik kontrolu kadar önemlidir ve birçok açıdan birbirine bağımlıdır. Aşağıdaki örneğimizde tek kanallı bir VAV sistemi incelenmektedir. DDC/BMS otomatik kontrolunun uygulandığı, son ısıtıcılı klasik VAV terminal ünitelerinin kullanıldığı, yaz çalışması değişken, kış çalışması sabit (minimum) hava debili ve sabit dış hava-dönüş havası karışım oranına sahiptir.
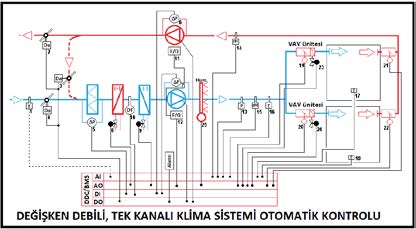
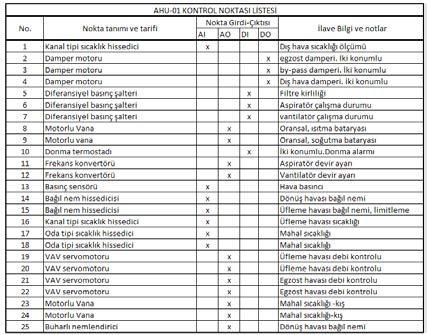
Bir önceki sayfadaki akış diyagramında kontrol noktalarının konumu ve bina otomasyon sistemi (BMS) ile olan ilişkisi görülmektedir. İkinci olarak verilen tabloda da kontrol noktaları, girdi-çıktıları ve kontrol özellikleri ile ilgili kısa bilgi sunulmaktadır. Bu iki şekil, akış diyagramı ile kontrol noktası listesi uygulama projesinde her klima santralı için ayrı ayrı bulunması gereken bilgilerdir. Buna ilaveten kontrol senaryosunun da bulunması gerekir.Bütün bir kontrol senaryosu “Mode of Operations” vermek yerine tüm elemanları gruplar halinde teker teker inceleyeceğiz.
2.2.3.1. Damper Kontrolları:
Klima santralı uygulamasında karışım havası varsa damper kontrolları iki değişik tarzda yapılabilir. Bunlardan birincisi sabit karışım oranıdır. Bu uygulama akış diyagramı ile kontrol noktası listesinde görülmektedir. Damper konumları manuel olarak ayarlanmış olup sistem çalıştığında damperler önceden ayarlanmış “açık” konumlarına gelerek belirli bir miktarda egzost, dış hava ve dönüş havası karışımını gerçekleştirirler.Örnek olarak 13.000 m3/h maksimum hava debisi olan bir değişken debili klima santralını inceleyelim. Bu uygulamada %50 karışım oranı (6500 m3/h dış hava , 6500 m3/h dönüş havası) kullanılmaktadır. Klima santralının ve buna bağlı olarak aspiratör debisinin VAV hareketleri paralelinde azalması karışım oranını etkilememektedir. Burada damperlere BMS tarafından yalnız “aç” ve “kapa” tarzında dijital (iki konumlu) çıkış ile sinyal verilmektedir. Bu sinyal paralelinde damperler önceden ayarlanmış açık konumlarına gelmektedir. “ Kapa ” komutu ise sistemin durdurulması ile verilir. Dijital çıktı “DO”olarak verilen bu sinyal vantilatörün durdurulması, vantilatör ve/veya aspiratörün arıza nedeniyle durması bir de donma termostatından gelen “donma” sinyali tarzındaki dijital girdiler “DI” neticesi verilir. Bu uygulamada kullanılan damper motorları iki konumludur. Yay geri dönüşlü servomotorların kullanımında açma elektrik motoruna verilen kumanda sinyali ile gerçekleştirilir. Sinyalin kesilmesi ile sermotorlar yay geri dönüşü ile kapama işlemini başlatırlar. Yay geri dönüşlü olmayan çift yöne dönüşlü servomotorlarda ise kumanda sinyalinin giriş klemensinin değiştirilmesi ile dönüş yönü saat ibresi veya saat ibresinin tersi olması sağlanır.
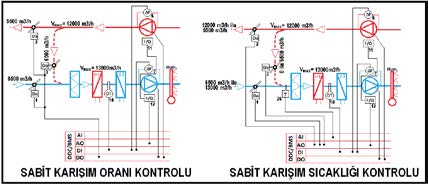
Diğer bir uygulama da sabit karışım sıcaklığıdır. Bu uygulamada dış hava ve dönüş havasının karışım oranı değil, karışım sıcaklığı esas alınmıştır. Karışım sıcaklığı “26” numaralı kanal tipi sıcaklık hissedici eleman ile algılanmakta ve BMS’e analog girdi “AI” olarak iletilmektedir. BMS de bu sıcaklığı sabit tutacak tarza 2, 3 ve 4 numaralı oransal damper motorlarına analog sinyal “AO” göndermektedir. Servomotorlar da damperlere oransal olarak kumanda ederek sabit karışım sıcaklığını sağlamaktadır.
Bu uygulamaya istendiği taktirde minimum dış hava limitlemesi ilave edilebilir. Bu uygulamada karışım sıcaklığı sabit tutulacak ancak dış hava miktarı, belirlenen minimum taze hava miktarının altına inmeyecektir. Bu husus damperlere kumanda eden servomotorlara limitleme ilavesi ile mekanik olarak yapılabilir. Diğer bir alternatif te dış hava debisinin pitot tüpü ile ölçülmesi ve minimum dış hava debisi ilgili limitlemenin BMS/DDC yazılımına ilave edilmesidir.
2.2.3.2. Üfleme Havası Sıcaklık ve Nem Kontrolları:
Değişken hava debili klima sistemlerinde sabit üfleme sıcaklığı uygulaması yapılır. Bunun için üfleme kanalında hava sıcaklığının ölçülmesi yeterlidir. Aşağıdaki akış diyagramında “16” numara ile gösterilen kanal tipi sıcaklık hissedicinin görevi üfleme kanalı sıcaklığını algılayıp BMS/DDC’ye analog girdi “AI” olarak bildirmektir. Girdi neticesi BMS/DDC yazılıma göre önce yaz-kış konumuna karar verir, bilahare ısıtıcı veya soğutucu bataryanın üzerindeki motorlu vanaya, gönderdiği analog çıktı “AO” ile kumanda eder. Yaz veya kış çalışmasına “16” numaralı kanal tipi hissedicinin sinyallerinden veya, alternatif olarak “1” numaralı, dış hava sıcaklık hissedicisi görevini gören dış hava emiş kanalı üzerine monte edilmiş hissediciden gelen sinyaller üzerine karar verilir. Yaz çalışması esnasında ısıtıcı batarya motorlu vanası tamamen kapalı, kış çalışmasında da soğutucu batarya motorlu vanası tamamen kapalı konumdadır.
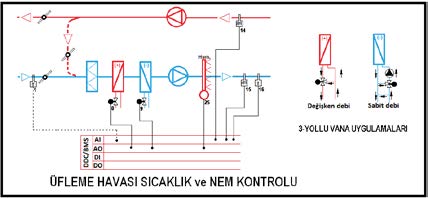
Tek kanallı değişken hava debili klima sistemlerinde iki yollu oransal kontrollu motorlu vana kullanımı yaygın bir şekilde uygulanmaktadır. Ancak bu uygulamada motorlu vananın kısık çalışması veya kapanması durumunda hidronik şebekede meydana gelebilecek basınç değişikliklerine karşı gerekli önlemlerin alınmış olması gerekir. By-pass basınç regülatörleri, frekans konvertörlü (invertörlü) sirkülasyon pompalarının kullanımı önlemlerden bazılarıdır. Hidronik balans bu kitabın kapsamı dışındadır, “Hidronik Klima Sistemleri” isimli kitabımızda detaylı olarak incelenecektir.
Diğer bir uygulama ise 3-yollu karıştırma vanalarının kullanımıdır. Değişken debili uygulamada soğutucu veya ısıtıcı batarya üzerinden geçen akışkanın debisi ısıtms veya soğutma ihtiyacına göre değişmektedir. Bu uygulamada akışkan giriş/çıkış sıcaklıkları sabit kalmaktadır. Bu husus soğutucu batarya için çok önemli olup soğutucu serpantin satıh sıcaklığını ve dolayısıyla cihaz çiy noktasını (ADP) belirler. Sabit debili uygulamada 3-yollu motorlu vana ile ısıtıcı veya soğutucu batarya arasında bir “sekonder devre” sirkülasyon pompası bulunmaktadır. Bu pompa sayesinde ısıtıcı/soğutucu akışkan debisi sabit olup akışkan giriş sıcaklığı ihtiyaca göre belirlenmektedir. Sekonder devre sirkülasyon pompaları sabit debili olabilecekleri gibi frekans konvertörlü de olabilirler. Frekans konvertörlü olmaları durumunda pompanın DDC/BMS’e bağlanmasında yarar vardır. Bu durumda vantilatör ve aspiratörün hava debisinin değişmesi durumunda pompaların da debileri otomatik olarak değişecektir.
Günümüzde daha kullanışlı olmaları, daha az yer kaplamaları nedeniyle buharlı nemlendiriciler yaygın olarak kullanılmaktadır. Ancak elde buhar yoksa ve paket tip buhar jeneratörü kullanılıyorsa nemlendiricinin besleme suyu muhakkak kireçten arındırılmış olmalıdır. Aksi taktirde nemlendirici elektrodları ve tankı bir süre sonra kirçle kaplanacak, görev göremez duruma gelecektir.
Nemlendirme proses kontrolu dönüş havası kanalı üzerine yerleştirilmiş bir kanal tipi bağıl nem hissedicisi (No.14) yardımı ile yapılır. Bu hissediciden alınan analog girdiler paralelinde DDC/BMS nemlendiriciyi oransal olarak kontrol eder. Üfleme kanalındaki kanal tipi bağıl nem hissedicisinin görevi üüst limit kontroludur. Buradan alınan sinyaller neticesi üfleme kanalı satıhlarında yoğuşma olması önlenir.
2.2.3.3. Donmaya Karşı Koruma
Eğer ısıtıcı batarya hava giriş sıcaklığı 0oC’ın altında ise ısıtıcı ve soğutucu bataryaların donma riski mevcuttur. Bu husus özellikle %100 dış hava ile çalışan klima santralları için geçerlidir. Karışım havalı santrallarda karışım havası sıcaklığı 0oC’ın üzerinde tasarlanmış bile olsa herhangi bir nedenle damper konumlarının mekanik arıza, harici müdahale gibi nedenlerle değişebileceği için bu tip santrallarda da donma riski mevcuttur. Donma olayının gerçekleşmesi santral bünyesinde su içeren tüm elemanları tahrip edeceği gibi klima santralının da elden çıkmasına neden olur. Bu nedenle muhakkak koruyucu önlem alınması gerekmektedir. Aşağıdaki sadeleştirilmiş akış diyagramında donmaya karşı koruma sistemi ile kapiler borulu tipik bir don termostadı görülmektedir.
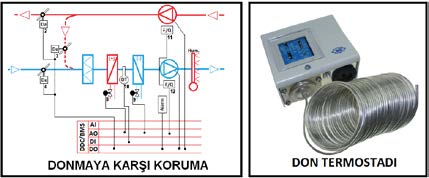
Donmaya karşı kullanılan temel duyar eleman “10” numara ile gösterilen don termostadı, veya tam adıyla “donmaya karşı koruma termostadı”dır. İki konumlu basit bir termostat gibi görünmesine rağmen bazı özellikleri vardır. Bu özelliklerden biri ayarlanabilir sıcaklık skalası ve ayarlanabilir bir sıcaklık diferansı olmasıdır. Diferansı sabit olan termostadlar da kullanılmaktadır ancak bu ayarın sahada yapılmasında ve bilinmesinde yarar vardır. Diğer bir husus ta “reset” ayarıdır. Otomatik resetli don termostadları donma riski ortadan kalktıktan sonra sisteme tekrar çalışma sinyali verebilirler. Manuel resetli olanlar ise üzerlerindeki reset düğmesine basılmadığı taktirde tekrar çalışma konumuna geçemezler. Eğer bir donma alarmı verilmişse bunun nedeninin mutlaka aranması, bulunması, giderilmesi ve giderildikten sonra resetlenmesi gerekir.
Isıtıcı ve soğutucu bataryalar üzerinde satıh sıcaklığı her noktada aynı olmadığı gibi hava akışı da eşit olmamaktadır. Bu nedenle hava akışının ve satıh sıcaklığının nispeten düşük olduğu noktalarda donma riski daha yüksektir. Ancak bu noktayı önceden belirlemek imkansız gibidir. Bu nedenle tek noktadan ölçüm yapan kuyruklu-rezervuarlı veya domuz kuyruklu termostadlar yerine uzun kapiler tipi hissedicisi olan termostadlar tercih edilmelidir. Kapiler boru, ısıtıcı bataryanın tüm sathını kaplayacak tarzda yerleştirilmelidir.
Herhangi bir nedenle ısıtıcı batarya hava çıkışındaki sıcaklığın +5oC’ın altına düşmesi durumunda bu sıcaklık 10 numaralı don termostadı tarafından hissedilecek ve dijital girdi “DI” olarak DDC/BMS’e iletilecektir. Bu sinyal alındığında aşağıdaki görevler yerine getirilir:
· Egzost ve dış hava damperleri “2” ve “4” tam kapalı konuma, karışım havası damperi “3” açık konumuna getirilir.
· “8” numaralı ısıtıcı batarya motorlu vanası tam açık konumuna getirilir.
· Vantilatör ve Aspiratör durdurulur (bu işlem doğrudan motor kontaktörlerine kumanda ile veya frekans konvertörü üzerinden yapılabilir).
· Sesli ve görüntülü (audio-visual) bir alarm yayınlanır.
Donma sinyalinin nedenleri bulunduktan ve giderildikten sonra sistem resetlenerek tekrar çalıştırılır.
2.2.3.4. Debi Kontrolu
Değişken debili bir klima sisteminde vantilatör ve aspiratör terminal ünitelerinden kaynaklanan debi değişimlerini yerine getirebilecek tarzda seçilmiş, gerekli elektro-mekanik ve/veya elektronik donanımlarla teçhiz edilmiş olmalıdır. Vantilatörlerde değişik debi modülasyon sistemleri uygulanmaktadır. Vantilatörün yapısıyla da yakından ilgili olan bu uygulamalar kitabın üçüncü bölümünde “Vantilatör Debi Kontrol Uygulamaları” başlığı altında detaylı olarak incelenecektir. Bu bölümde otomasyon ile ilgili esaslar verilmektedir.
En basit debi kontrolu vantilatör ve aspiratör debilerinin eşit olduğu sistemlerde, üfleme kanalındaki toplam hava basıncının sabit tutulması ile yapılan kontrol sistemidir. Akış diyagramı aşağıda görülen uygulamada üfleme kanalı üzerine yerleştirilmiş bir basınç sensörü (“P”, No.13) kanaldaki toplam basıncı algılamakta ve analog girdi olarak DDC/BMS’e iletmektedir. Basıncın artması halinde DDC/BMS’den 12 numaralı frekans konvertörüne gönderilen sinyal ile vantilatör devri, basınç istenen seviyeye ininceye kadar, düşürülmektedir. 12 numaralı frekans konvertörü ile aspiratöre ait olan 11 numaralı frekans konvertörü asil-köle olarak irtibatlandırılmışlardır. Vantilatör devrinin düşmesi (bu işlem konvertöre gönderilen, örneğin 0-10VDC kumanda sinyali ile elektrik motoruna iletilen frekansın düşürülmesi ile gerçekleştirilmektedir) aynen aspiratöre kumanda eden konvertöre de iletilmekte ve onun da aynı tarzda devrinin, dolayısıyla debisinin düşmesi gerçekleştirilmektedir.
Örneğimizde, günümüzün en yaygın uygulaması olan frekans konvertörü esas alınmıştır. Frekans konvertörü yerine vantilatör-aspiratör arasına by-pass hattı konulması da diğer bir uygulama tarzıdır. (Vantilatör ve aspiratör emişlerine “inlet guide vane” giriş havası kontrol damperleri, veya atış tarafına reglaj damperi uygulaması da yapılmaktadır. Bu son iki örnek üçüncü bölümde karşılaştırılmalı olarak ele alınacaktır.)
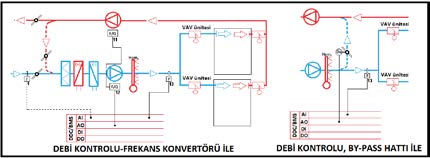
By-pass hattı uygulamasında vantilatör ve aspiratörün frekans konvertörü ile donatılmasına gerek yoktur. 13 numaralı kanal tipi basınç hissedici elemanın hissettiği ve analog girdi “AI” olarak DDC/BMS’e gönderdiği sinyaller uyarınca by-pass hattı üzerindeki oransal damper kontrollu olarak açılmakta ve üfleme kanalındaki basıncın sabit kalması sağlanmaktadır. Bu uygulama ilk yatırım maliyeti olarak ekonomik görünse de enerji tasarrufu açısından hiçbir kazanç sağlamamakta, uzun vadede çok daha pahalıya gelmektedir. Elektroniğin son derece geliştiği günümüzde bu uygulamanın 1 HP’den küçük elektrik motorlarının kullanıldığı küçük klima sistemlerinde kullanılması önerilir.
Diğer bir uygulama vantilatör ile aspiratör arasındaki debi farkının değişen değerlere bağlı kalmaksızın sabit kalması durumudur. Bu uygulama pozitif basınçlandırmanın yapıldığı ve/veya insan sayısına bağlı olarak belirli bir miktarda dış havanın gerektiği uygulamalar için geçerlidir. Bu uygulama ile ilgili bir debi münasebeti grafit olarak aşağıda verilmektedir.
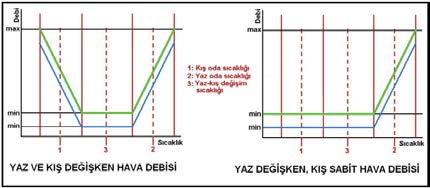
Grafikte yeşil çizgiler vantilasyon, mavi çizgiler de aspirasyon debilerini göstermektedir. İki debi arasındaki fark sabit olup gerekli olan dış hava debisine eşittir. Böyle bir uygulamada üfleme kanalındaki havanın toplam basıncının ölçülmesine ilaveten vantilatör ve aspiratör debilerinin de ölçülüp DDC/BMS’e analog girdiler olarak iletilmesi gerekmektedir.
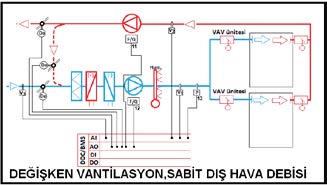
13 Numara ile gösterilen üfleme kanalı toplam basınç hissedici elemanı bu uygulamanın da vazgeçilmez temel elemanlarından biridir. Vantilatör debisi daha önce anlatıldığı gibi bu hissedicinin gönderdiği analog girdiler uyarınca DDC/BMS tarafından 12 numaralı frekans konvertörüne gönderilen sinyaller ile gerçekleştirilir. “V1”, “V2” hava hızını ölçen, pitot tüpü benzeri dinamik basınç transdüserleridir. “V1”üfleme kanalındaki hava hızını, “V2” ise dönüş havası kanalındaki hava hızını ölçer ve analog girdiler olarak DDC/BMS’e gönderir. Gelen sinyalleri yüklenmiş yazılım ile debiye dönüştüren DDC/BMS iki debi arasındaki farkı sabit tutacak tarzda 11 numaralı frekans konvertörüne analog çıktılar göndererek aspiratör debisini, devir ayar suretiyle regüle eder. Vantilatör frekans konvertörü ile aspiratör frekans konvertörü arasındaki ilişki daha önceki örneklerde gösterildiği gibi asil-köle uygulaması tarzında değildir.Vantilatör ve aspiratör frekans konvertörleri “11” ve “12” birbirinden bağımsız olarak DDC/BMS’e bağlıdır ve buradan gelen analog çıktılar “AO” ile kontrol edilir.
Diğer önemli bir husus ta dış hava kanalı üzerine yerleştirilen “V3” kodu ile gösterilen hava hızını ölçen, pitot tüpü benzeri dinamik basınç transdüserleridir. “V3”den gelen analog girdiler ile DDC/BMS dış hava debisini sabit tutmak için damper motorları “Da”lara kumanda eder. Damperlerin servomotorları da önceki misalde olduğu gibi iki konumlu olmayıp bu uygulama için oransal servomotorlarla değiştirilmiştir.
2.2.3.5. Arıza ve Durum Kontrolları
Bir klima sisteminin sağlıklı çalışabilmesi onu meydana getiren elemanların sağlıklı çalışmasına bağlıdır. Bu nedenle tüm hareketli elemanlardan konum bilgilerinin DDC/BMS’e iletilmesi, izlenmesi, eğer verilen komut paralelinde bir işlem oluşmuyorsa bununla ilgili alarm sinyalinin verilmesi gerekir. Alarm sinyali alınması gereken yerler arasında aşağıdaki elemanlar gösterilebilir.
· VAV terminal ünitesi servomotorları(damper konumu”AI”)
· VAV terminal ünitesi ısıtıcı bataryası motorlu vanası (servomotor konumu”AI”)
· VAV terminal ünitesi elektrikli ısıtıcı bataryası emniyet termostadı(üst limit “DI”)
· Damper servomotorları konumları (iki konumu ise açık-kapalı sinyali, oransal ise konum sinyali “DI”)
· Vantilatör, aspiratör çalışma sinyali (DI)
· Hava filtresi durumu (temiz-kirli “DI”)
Yukarıda yer alan arıza-durum sinyalleri çoğaltılabilir. Ancak detaylı olarak incelenmesi konumuz dışıdır. Bu nednele yalnız vantilatör, aspiratör ve filtre ile ilgili olanlar akış diyagramında gösterilmektedir.
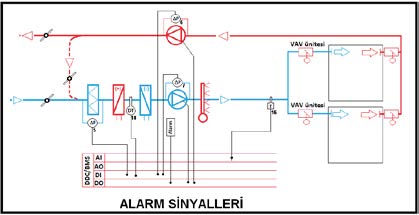
Filtre veya filtreler klima sisteminin en önemli parçalarından biridir. Vantilatör seçimi yapılırken maksimum filtre direnci dikkate alınır. Bu değer vantilatör tipini, devir sayısını ve elektrik motorunun büyüklüğünü etkiler. Filtrelerin temiz iken bir başlangıç direnci vardır. Bu direnç kirlenme neticesi artmaya başlar. Eğer filtre direnci kirlenme neticesi seçilen değerin üstüne çıkarsa vantilatör istenen debiyi sağlayamaz. Bu nedenle filtre kirliliğinin, başka bir deyişle tıkanmasının kontrolu ve istenen değeri aşması durumunda gerekli uyarının verilmesi gerekir. Örneğimiz olan akış diyagramında bu işlem 5 numaralı diferansiyel basınç şalteri ile yerine getirilmektedir. İki konumlu bir basınç ölçer olan bu eleman fitlenin giriş ve çıkışı arasındaki basınç düşümünü ölçer ve ölçülen değer önceden belirlenen seviyeyi geçmesi durumunda DDC/BMS’e dijital bir girdi “DI” gönderir. Bu girdi sayesinde ses ve görüntülü bir sinyal verilir, aynı zamanda (eğer istenirse) monitörde “tıkanmış filtre” alarmı görüntülenir. Filtre temizlendikten veya değiştirildikten sonra sinyal kaldırılır ve sistem normal görevine döner.
Benzeri bir işlem de vantilatör ve aspiratör için yapılır. Aynı diferansiyel basınç şalterinin uçları vantilatör (ve aspiratör) giriş-çıkışlarına yerleştirilir. Vantilatörün çalışması debi ile birlikte bir basınç yükselmesi de sağlayacaktır. Bu yükselme giriş-çıkış arasındaki fark olarak belirlenir. Eğer fark sıfır ise vantilatör (veya aspiratör) çalışmıyor demektir. Bu tarzda bir dijital girdinin alınması durumunda alarm verilir, sistem durdurulur. Burada akla gelen bir husus şu olabilir: Acaba diferansiyel basınç şalteri yerine gerekli sinyal vantilatör ile aspiratörün yol verme tertibatından, örneğin frekans konvertöründen alınamaz mı? Evet alınabilir ancak vantilatör/aspiratör kayış-kasnak mekanizmasıyla tahrik ediliyorsa kayış kopması durumunda frekans konvertörü hala çalışma sinyali verecektir. Bu nedenle frekans konvertöründen sinyal alınsa bile diferansiyel basınç şalteri uygulaması gereklidir.
Diğer bir alarm sinyali de üfleme kanalındaki sıcaklık algılayıcıdan alınabilir. Bu uygulama için kanal tipi sıcaklık algılayıcının yanına bir de iki konumlu kanal tipi termostat koymaya gerek yoktur. 16 numaralı termostattan gelen analog girdiler bu işlem için yeterlidir.
Çok önemli bir alarm sinyali de 10 numaralı don termostadından alınır. Bununla ilgili detaylı bilgi 78’inci sayfadaki 2.2.3.3. sayılı konuda verilmiştir.
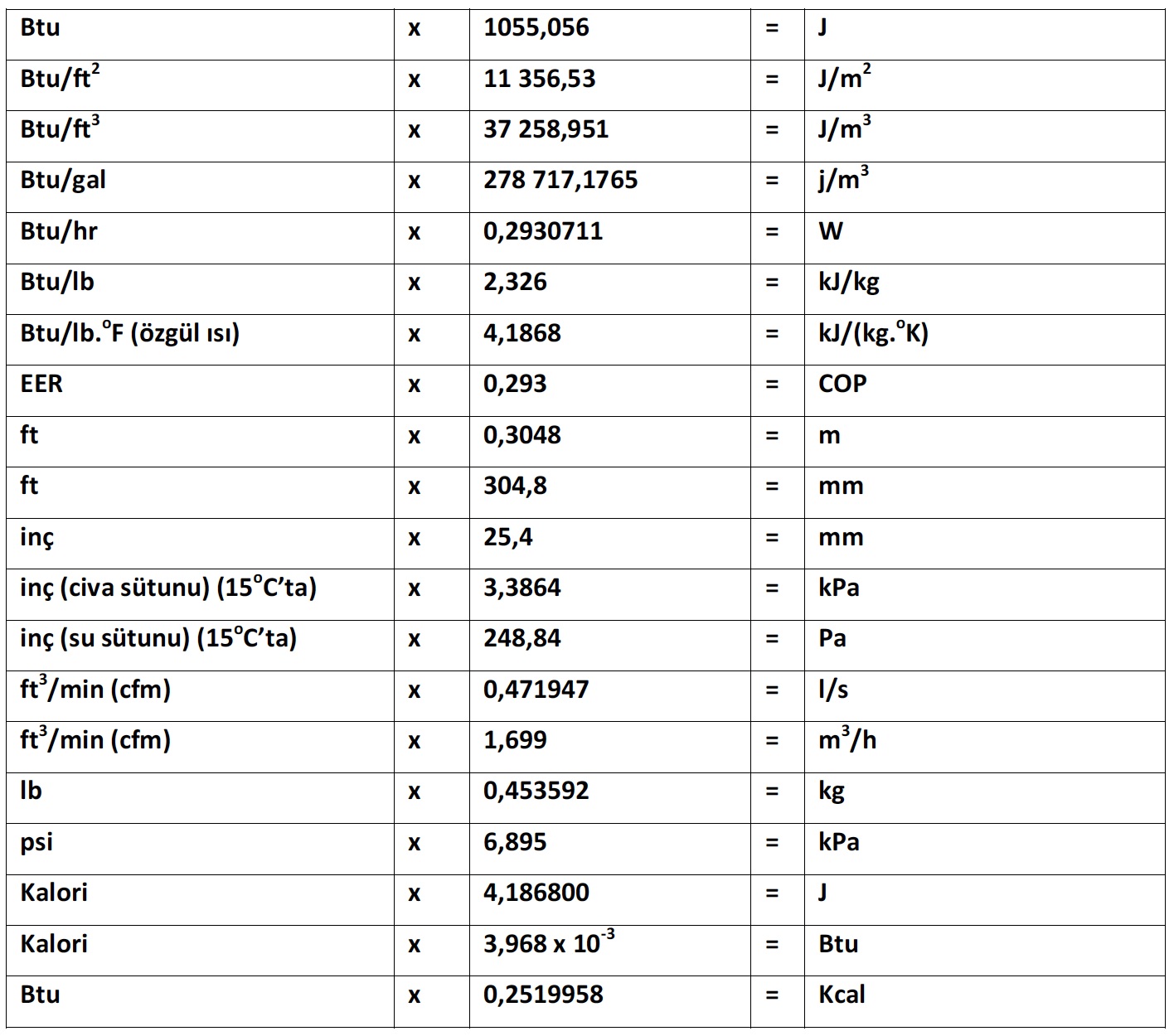 5.2. Birim dönüşümleri için çarpımlar
5.2. Birim dönüşümleri için çarpımlar 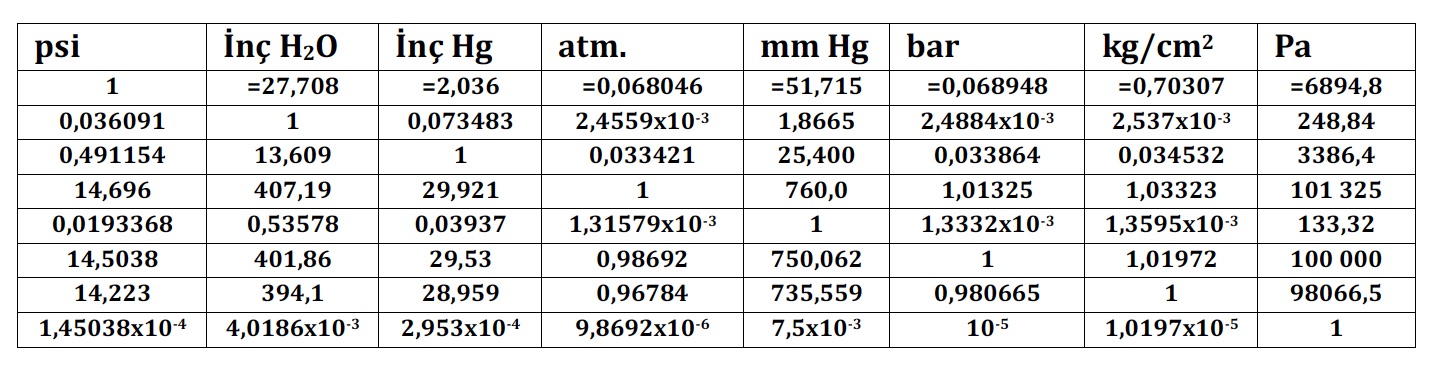
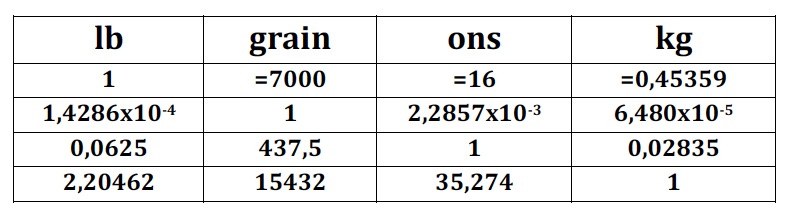
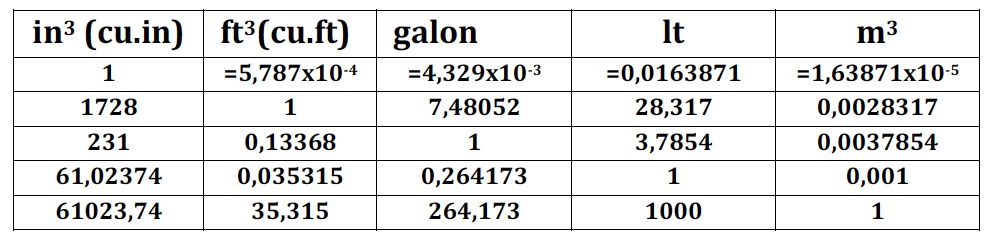
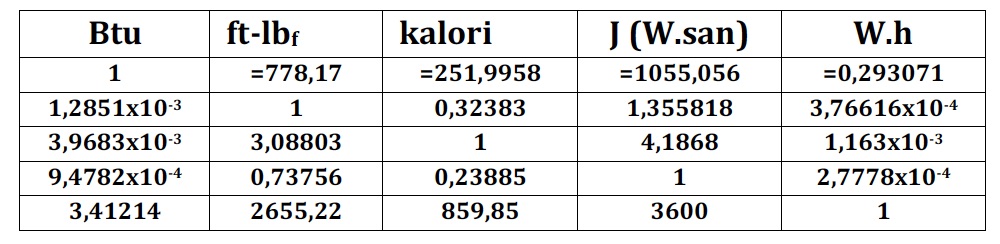
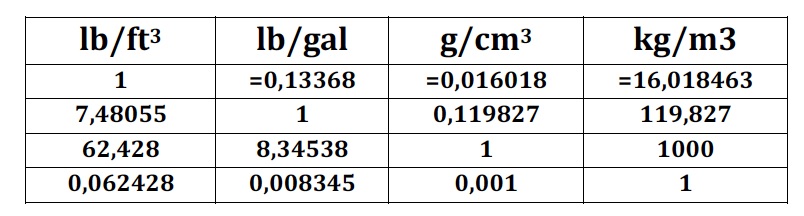
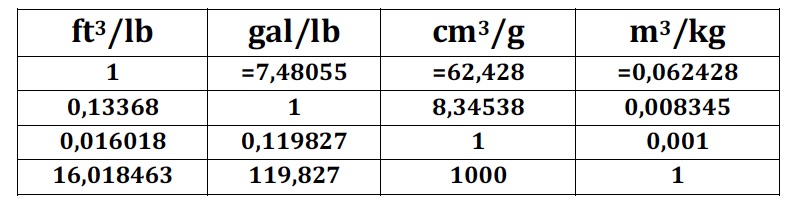

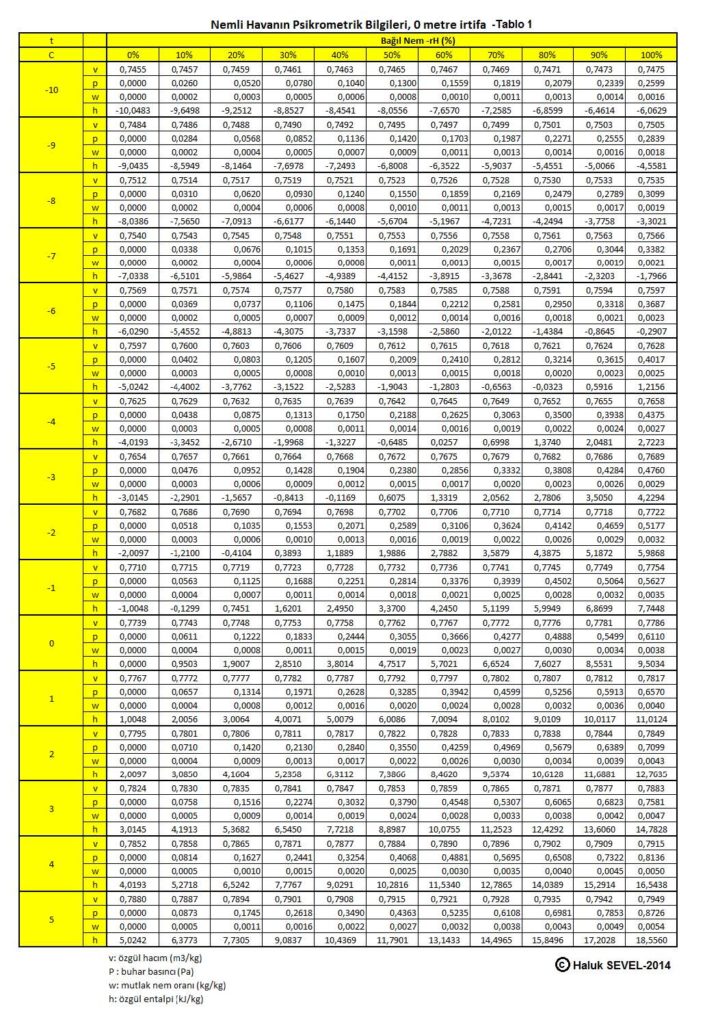
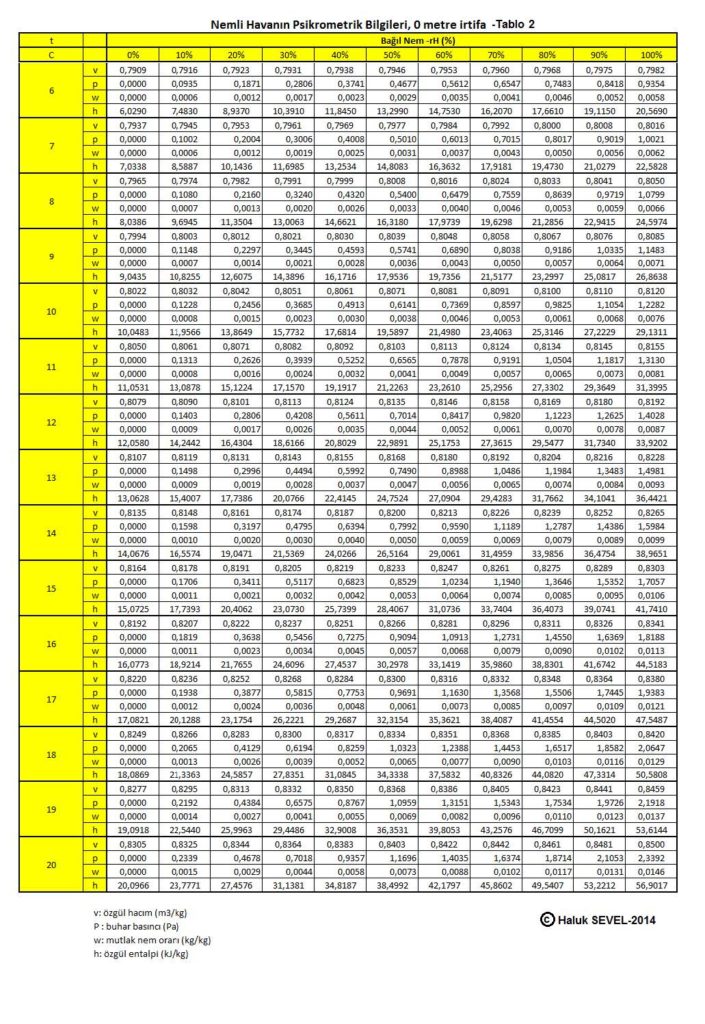
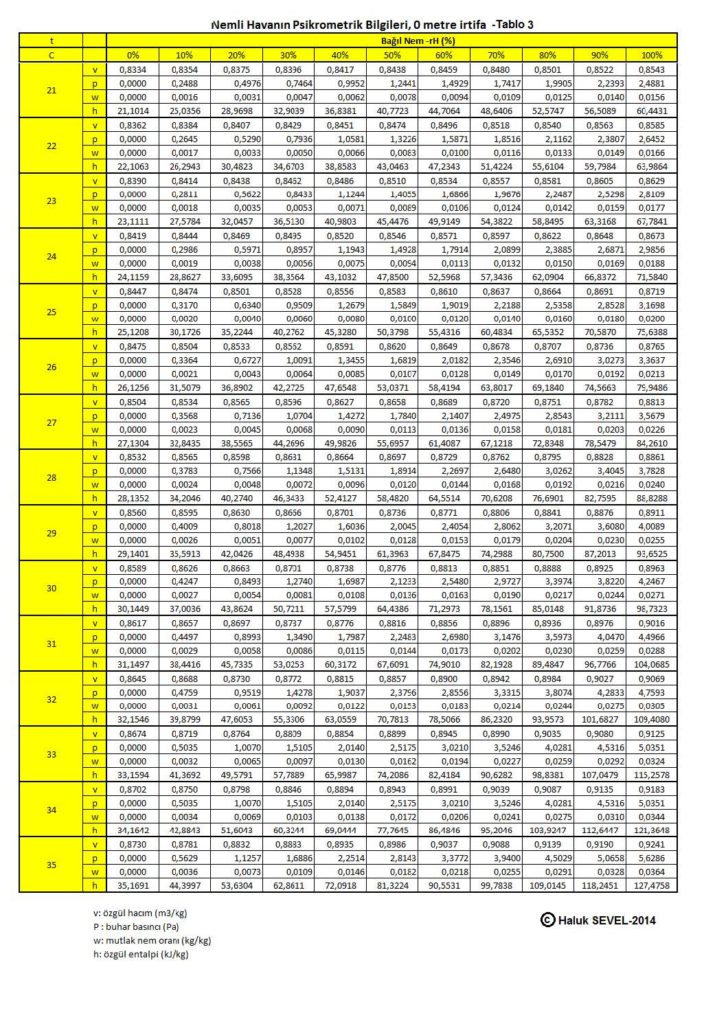
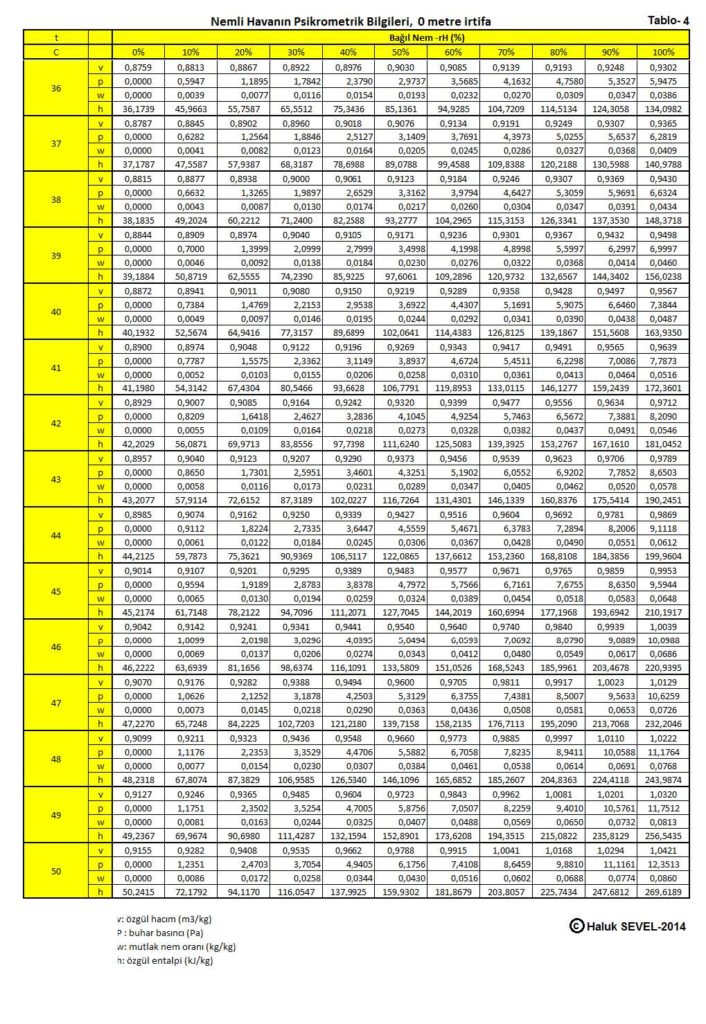
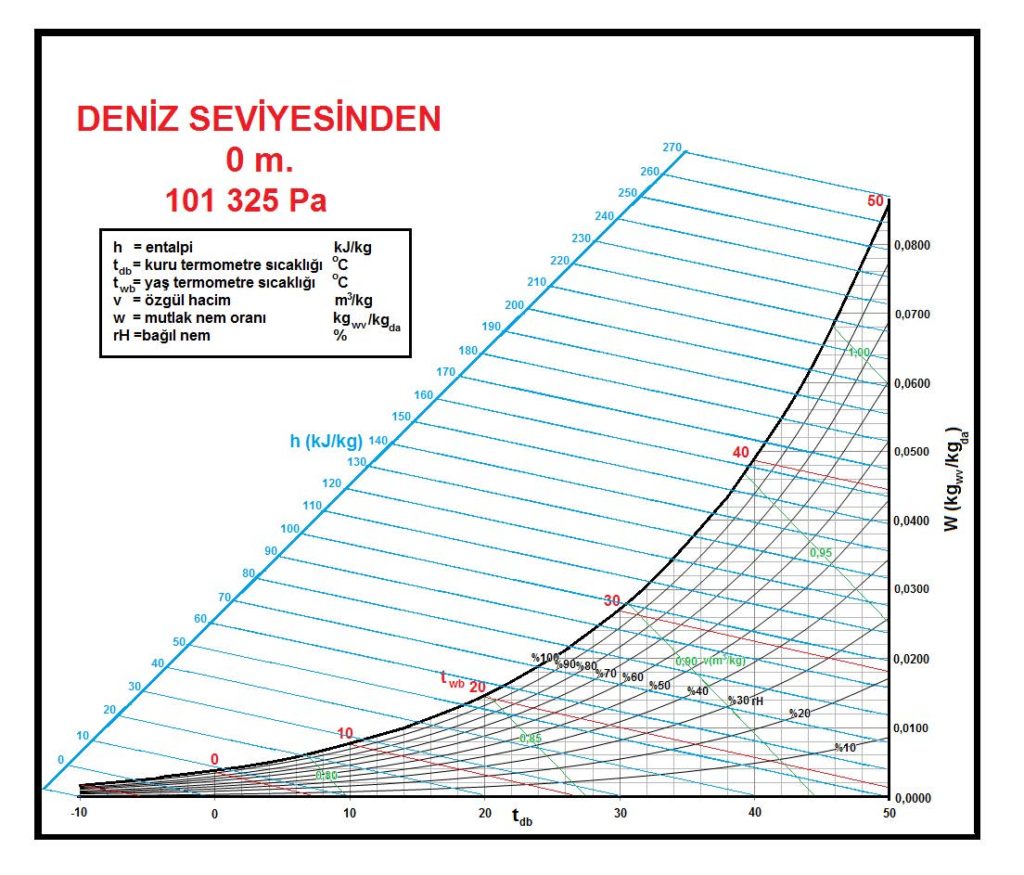
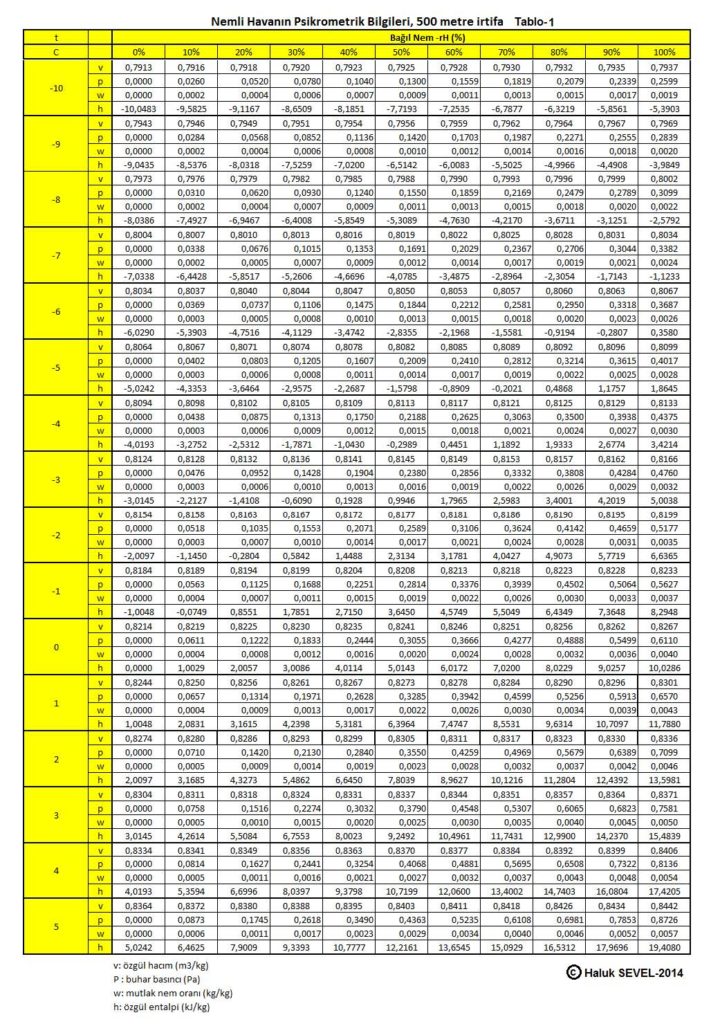
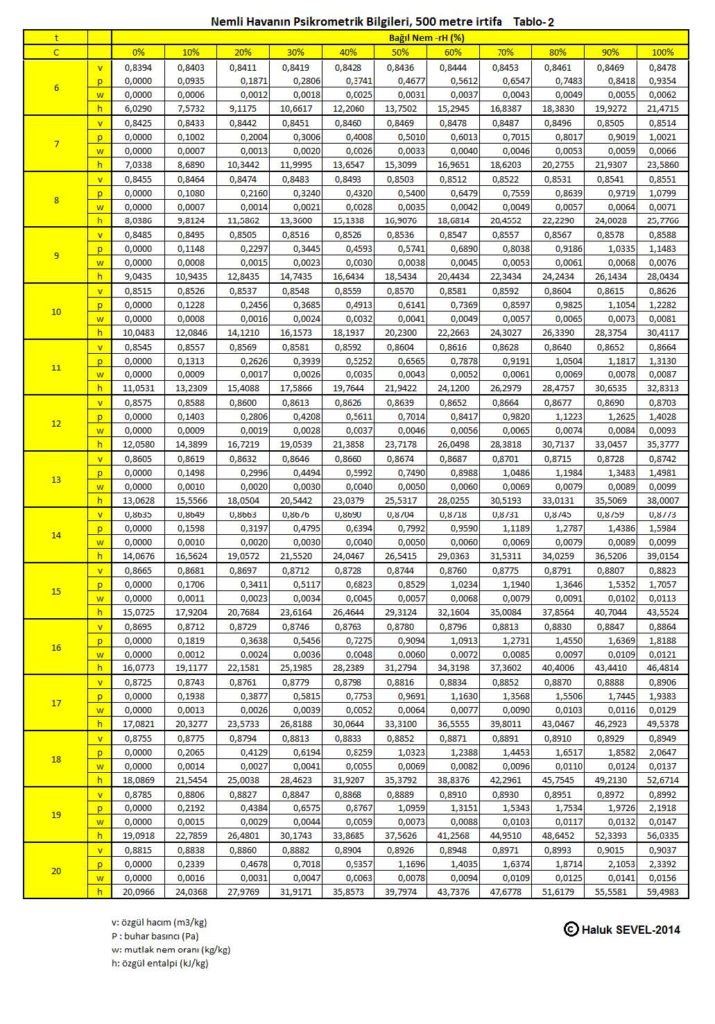
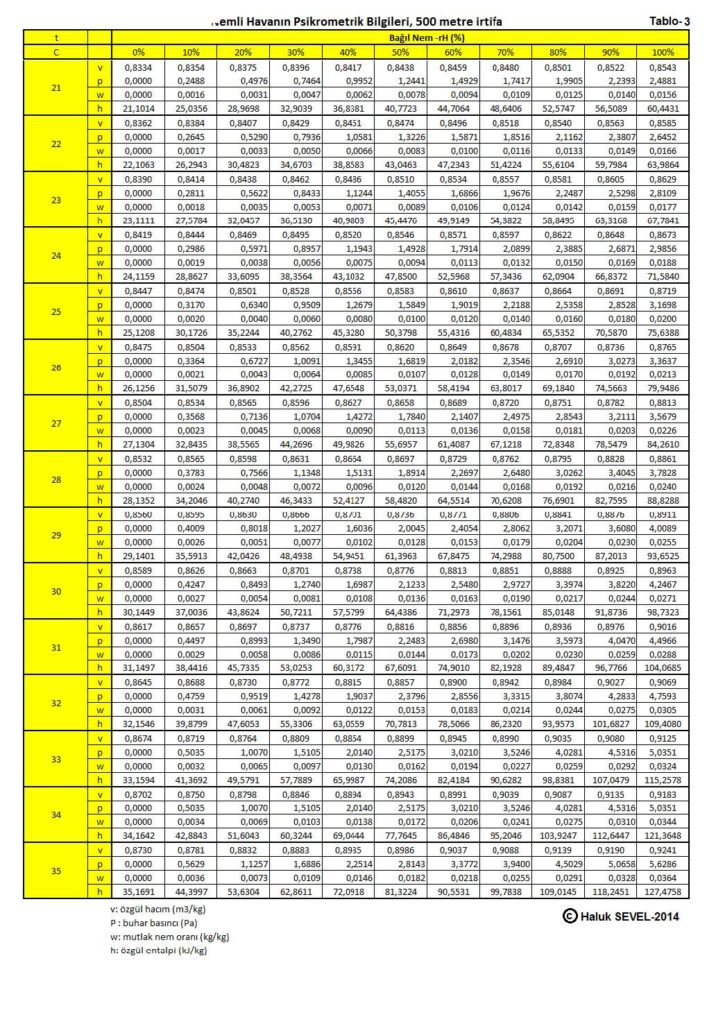
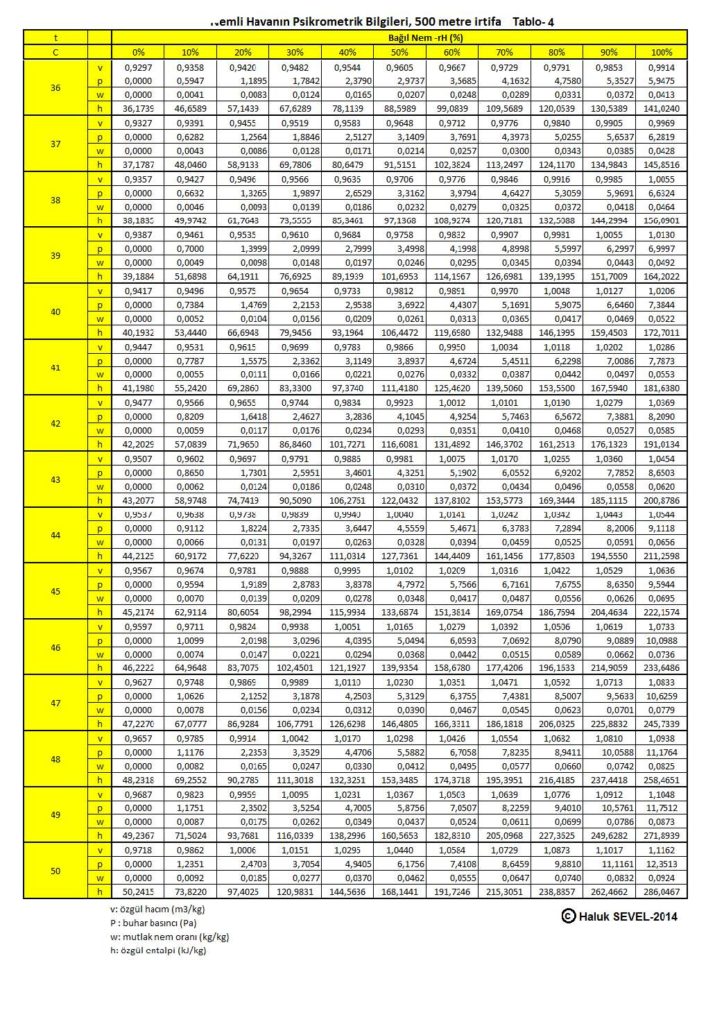
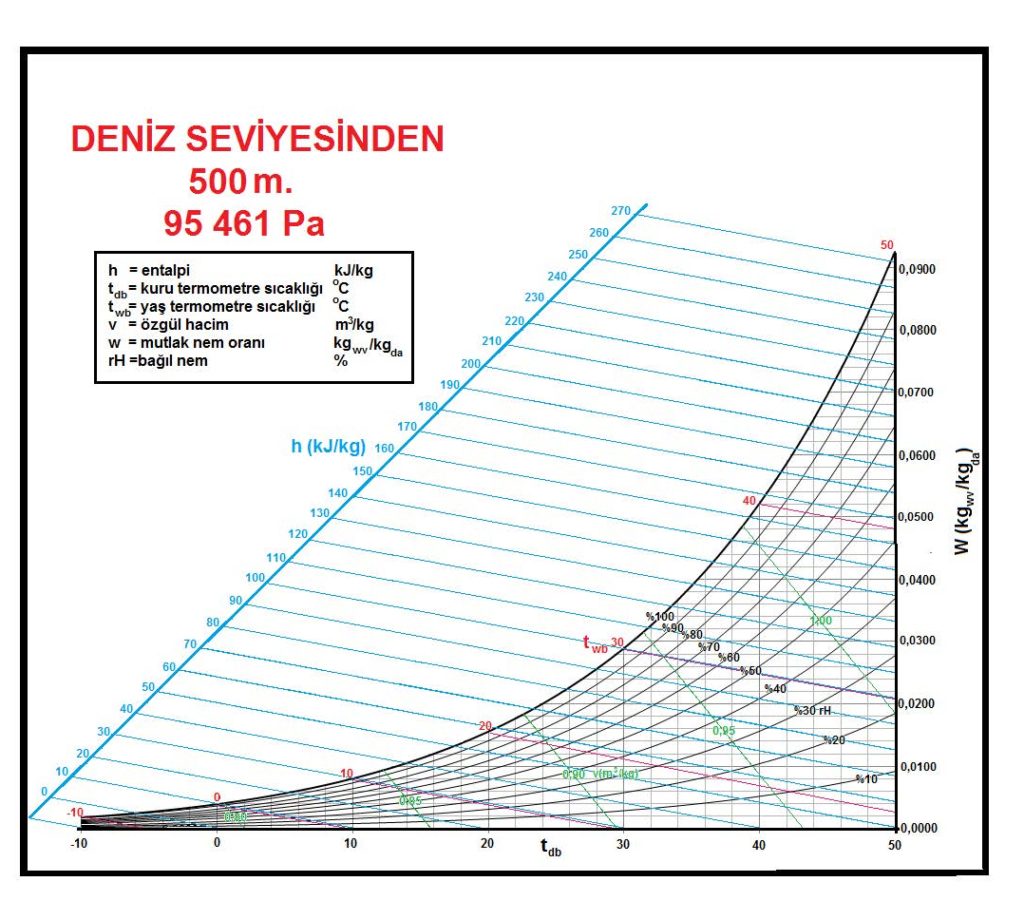
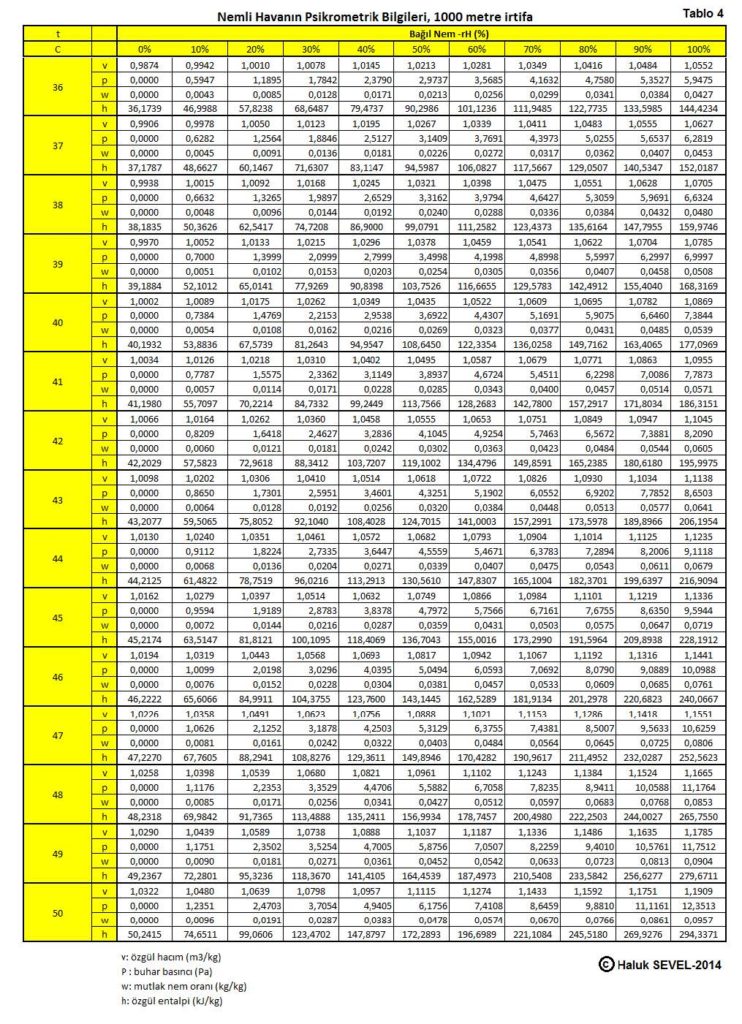
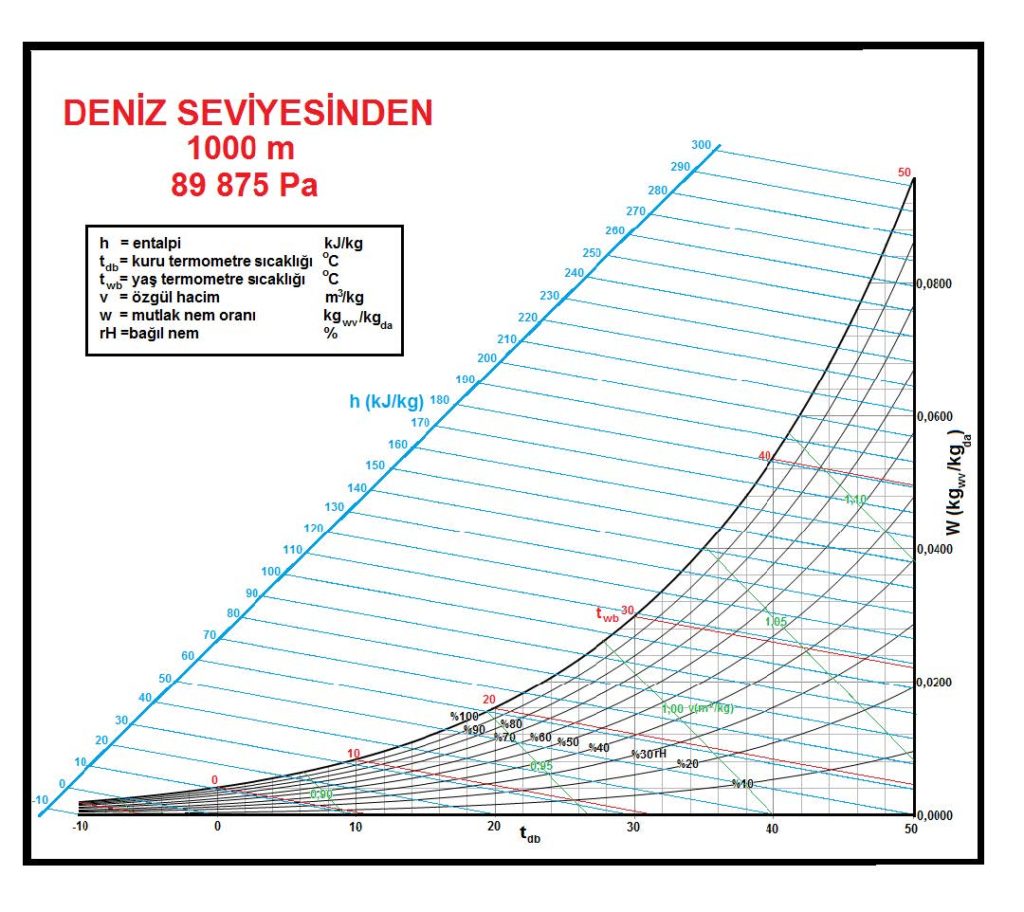
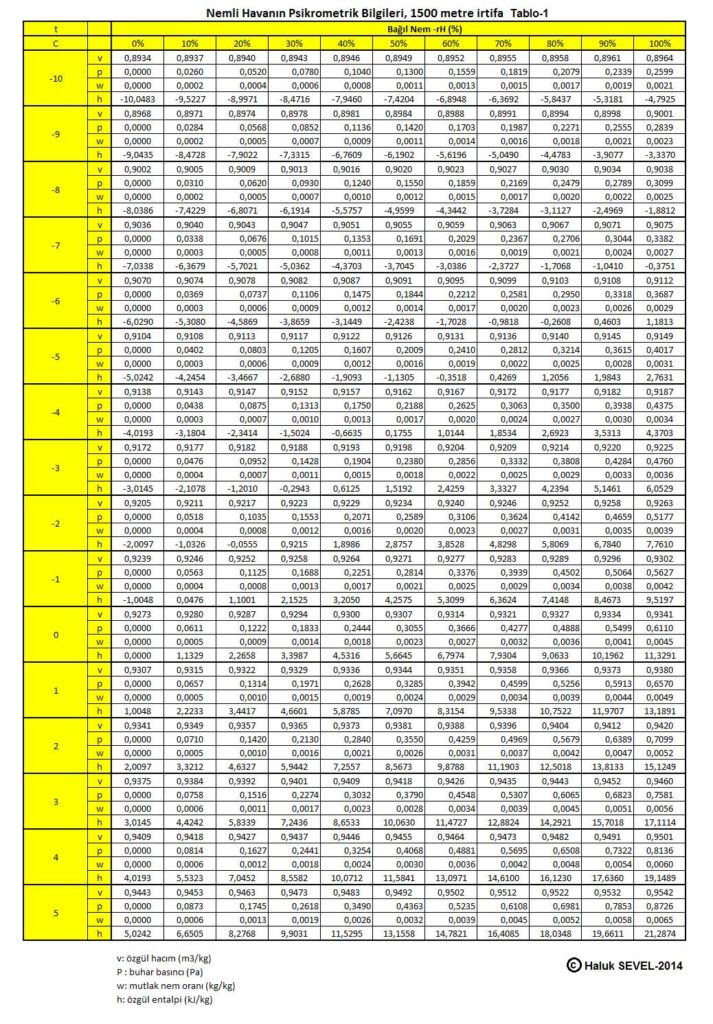
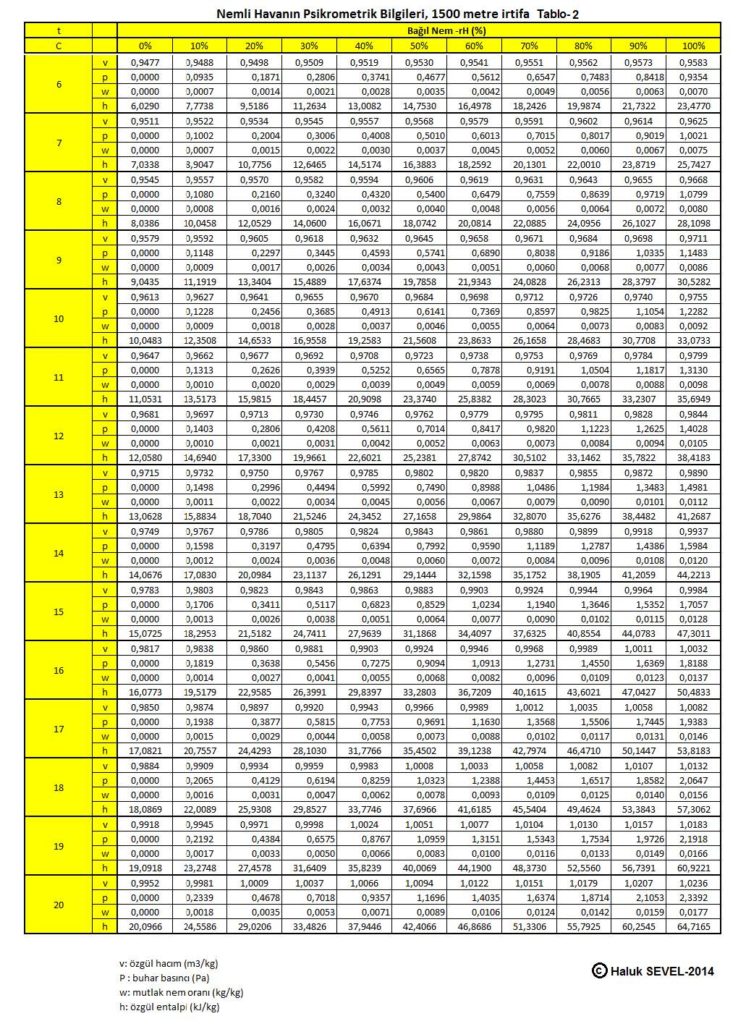
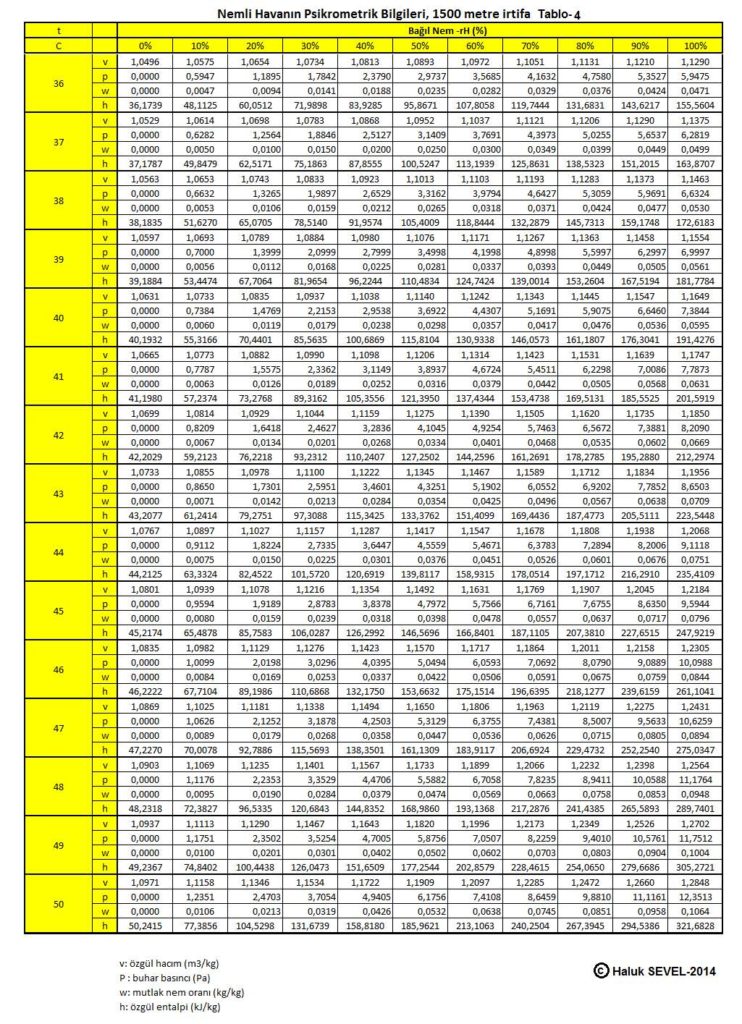

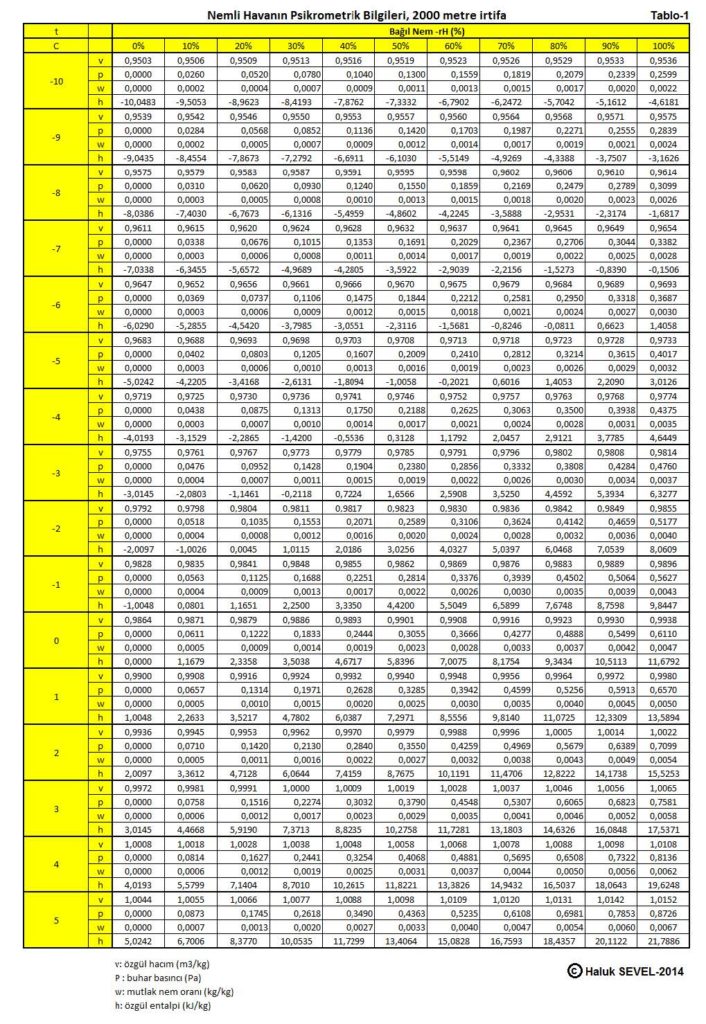
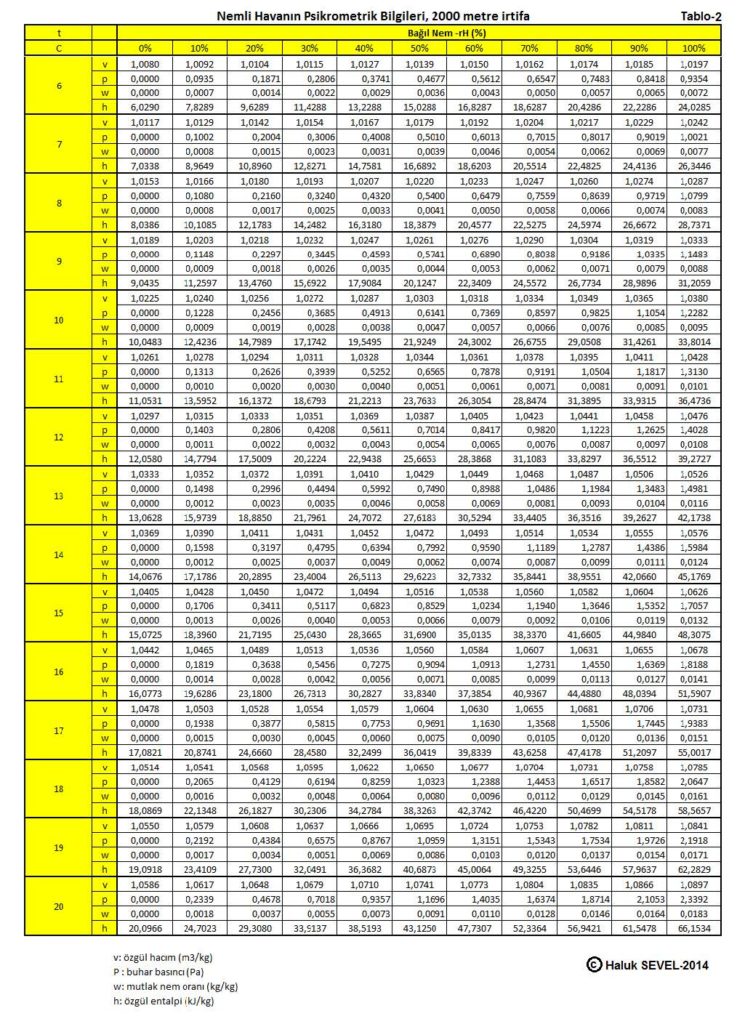
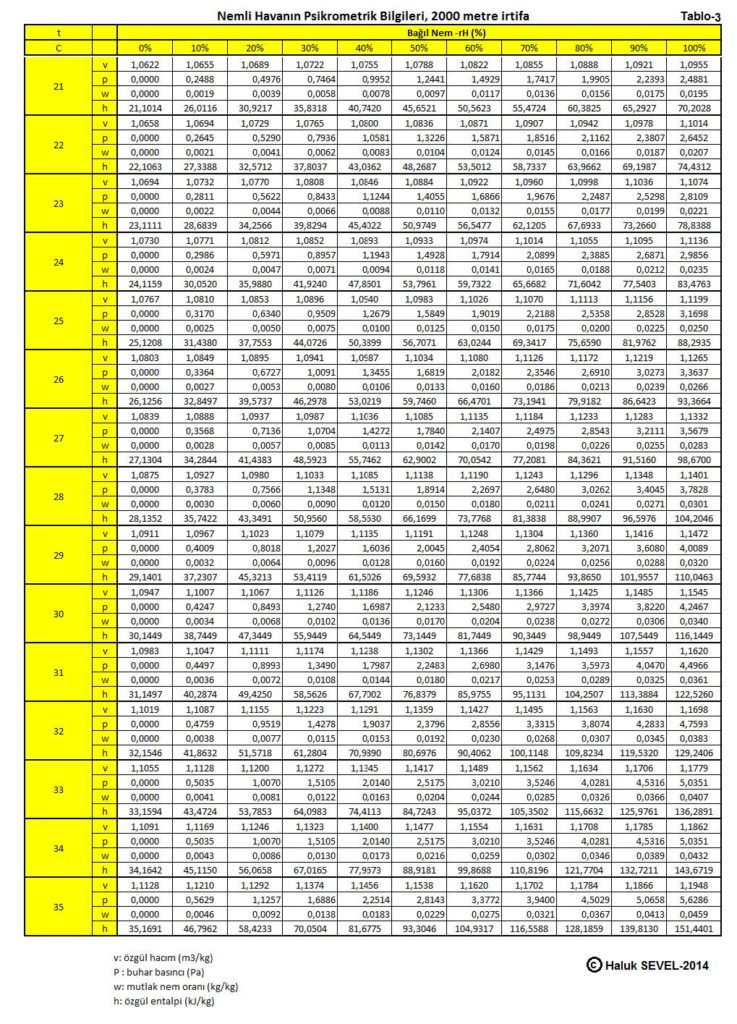
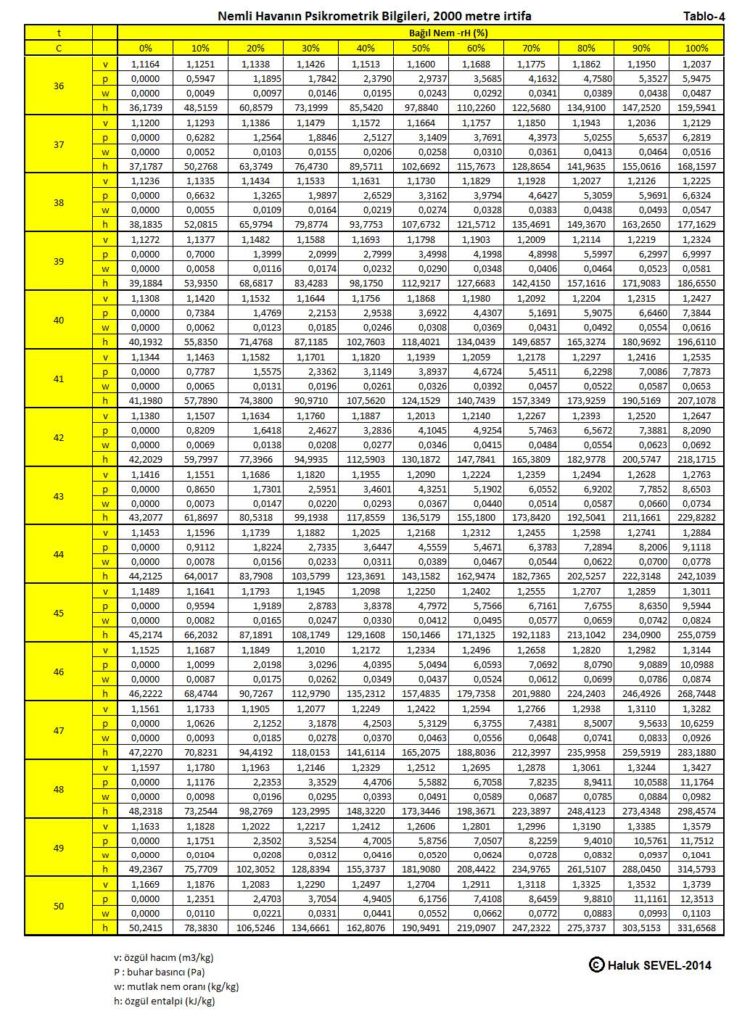
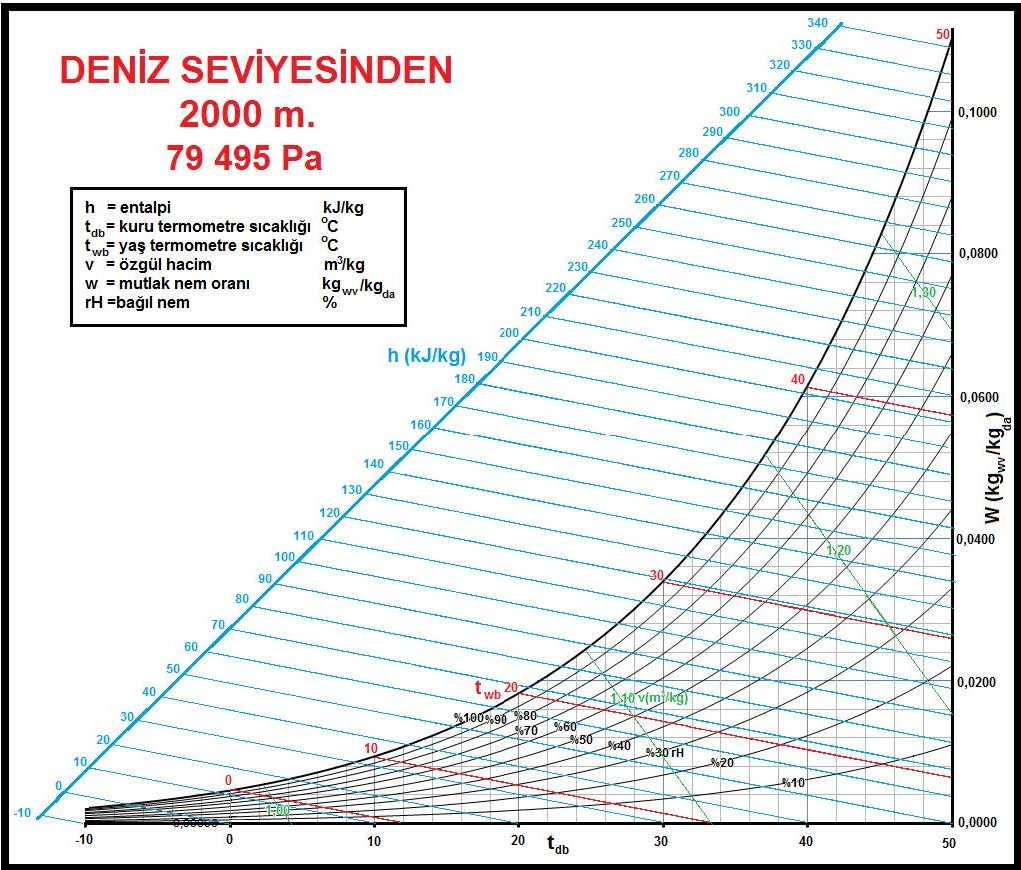
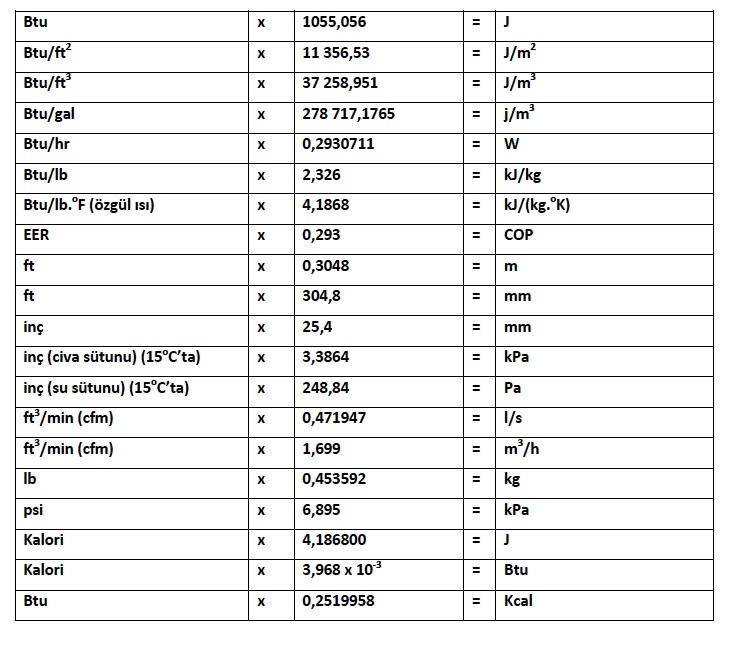
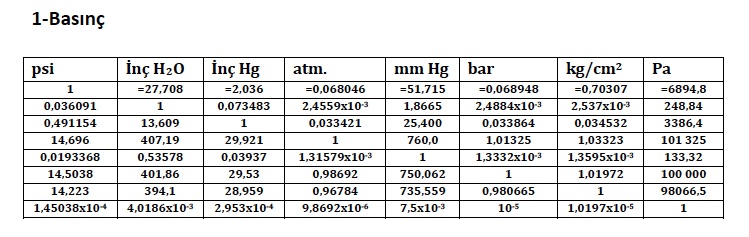
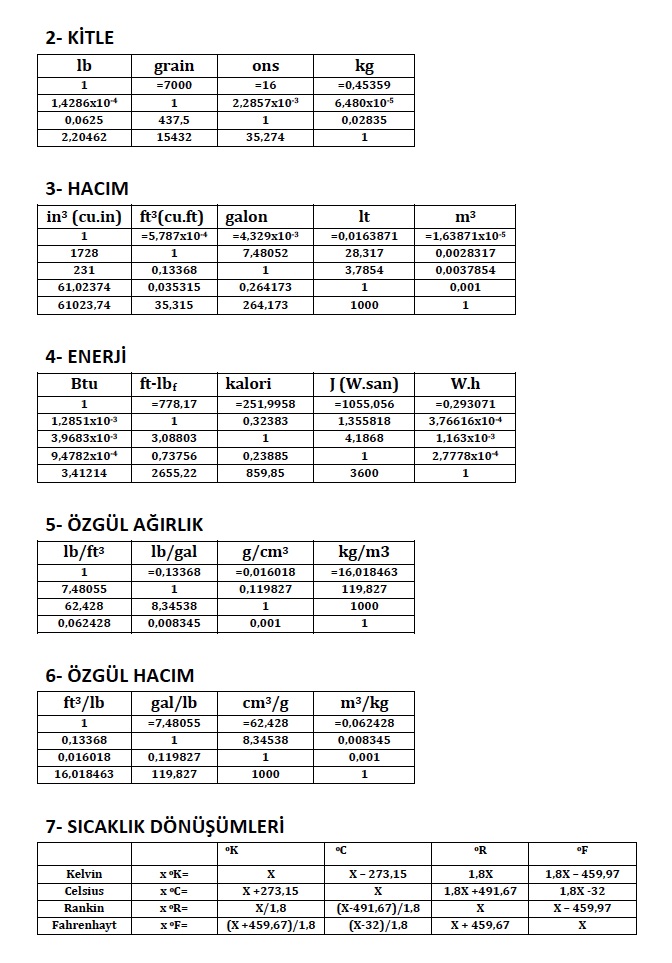
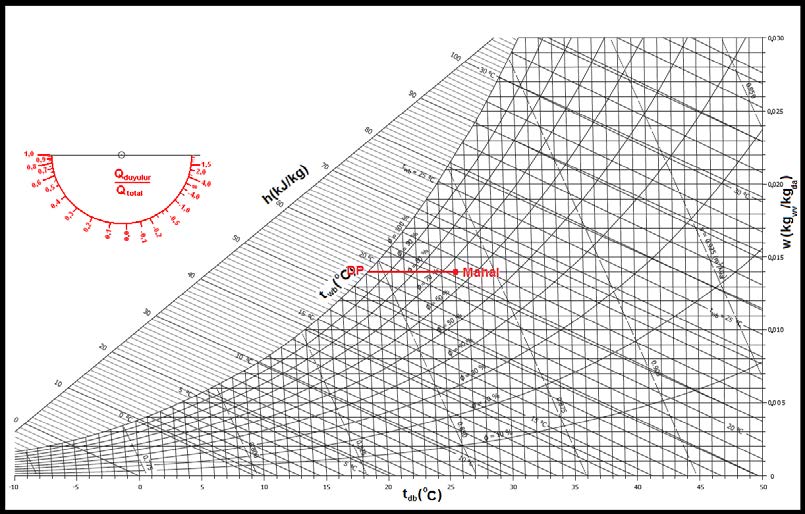
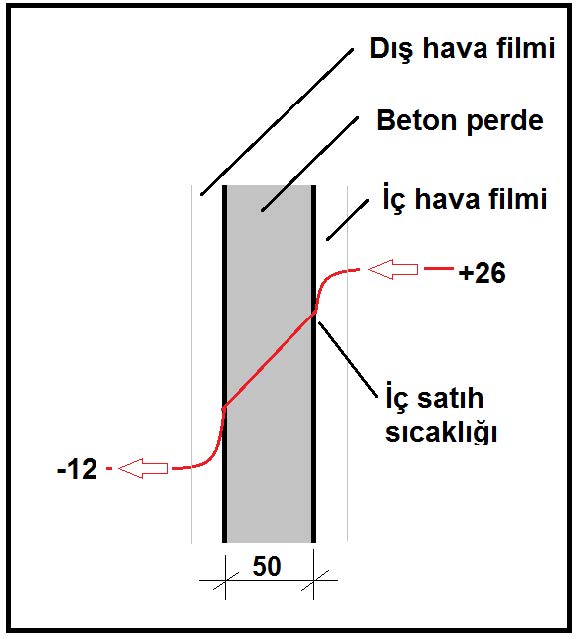
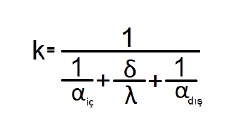
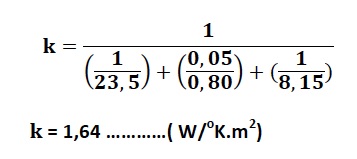
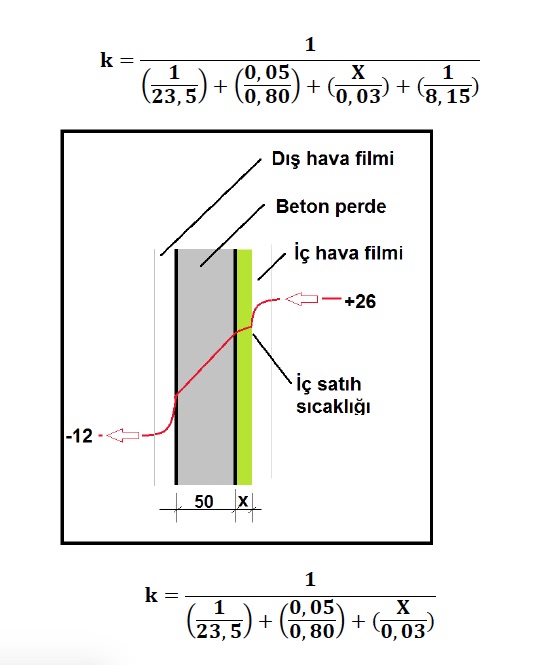
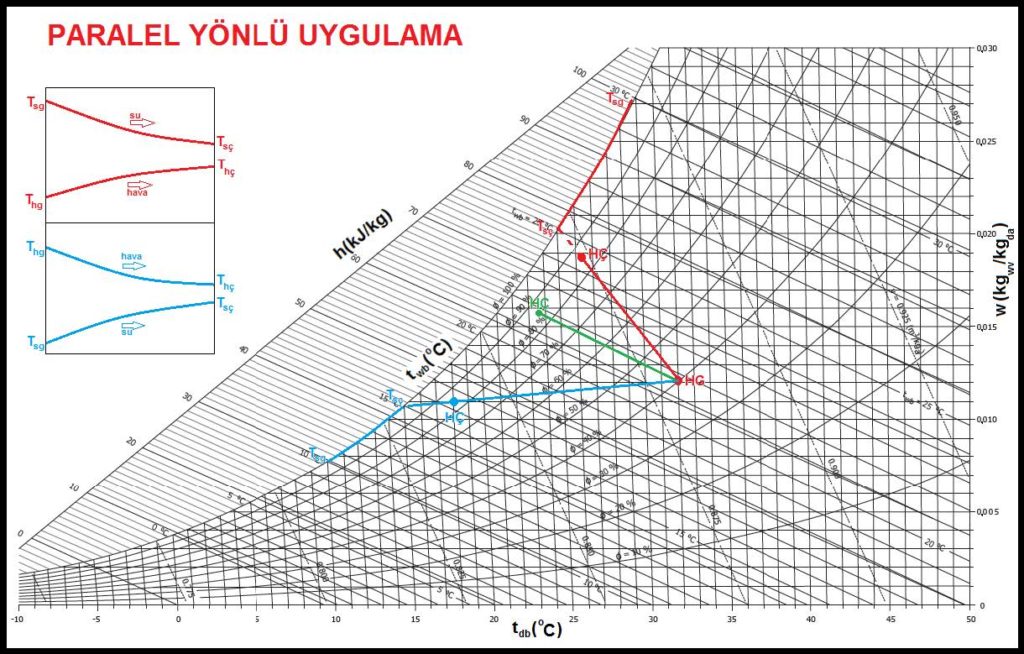
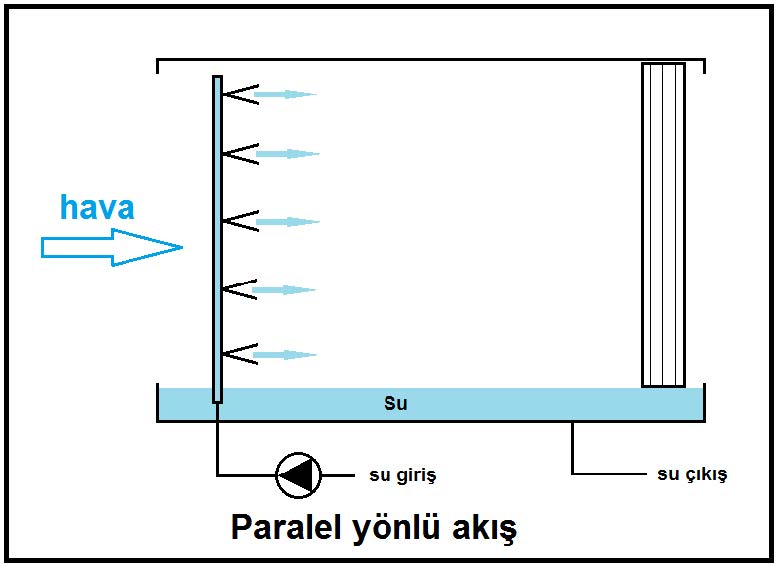
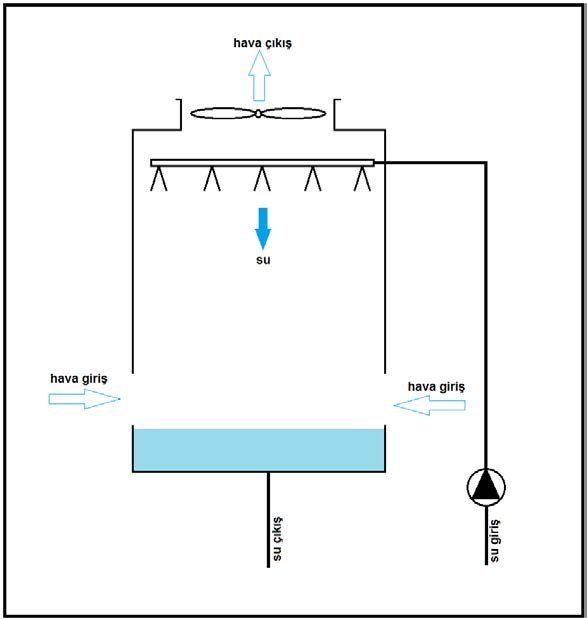
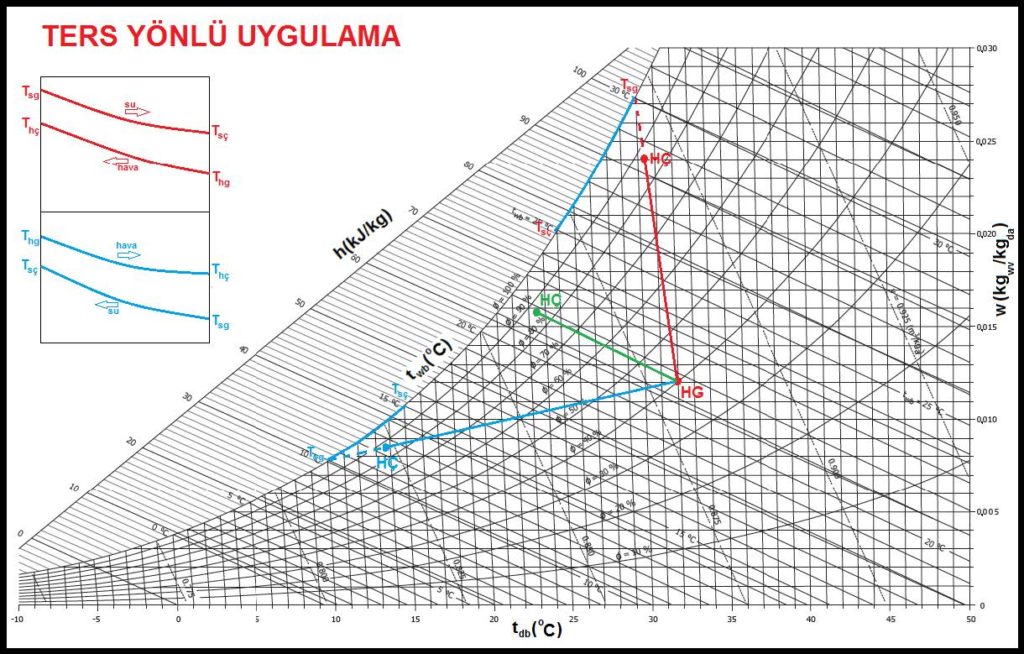
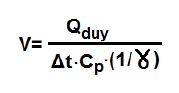
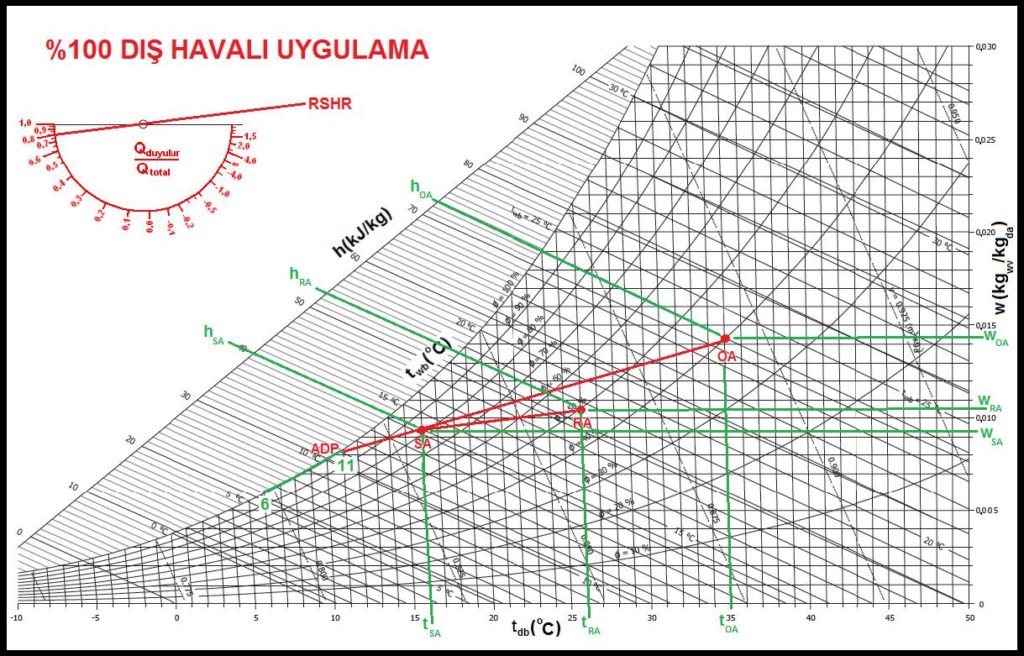
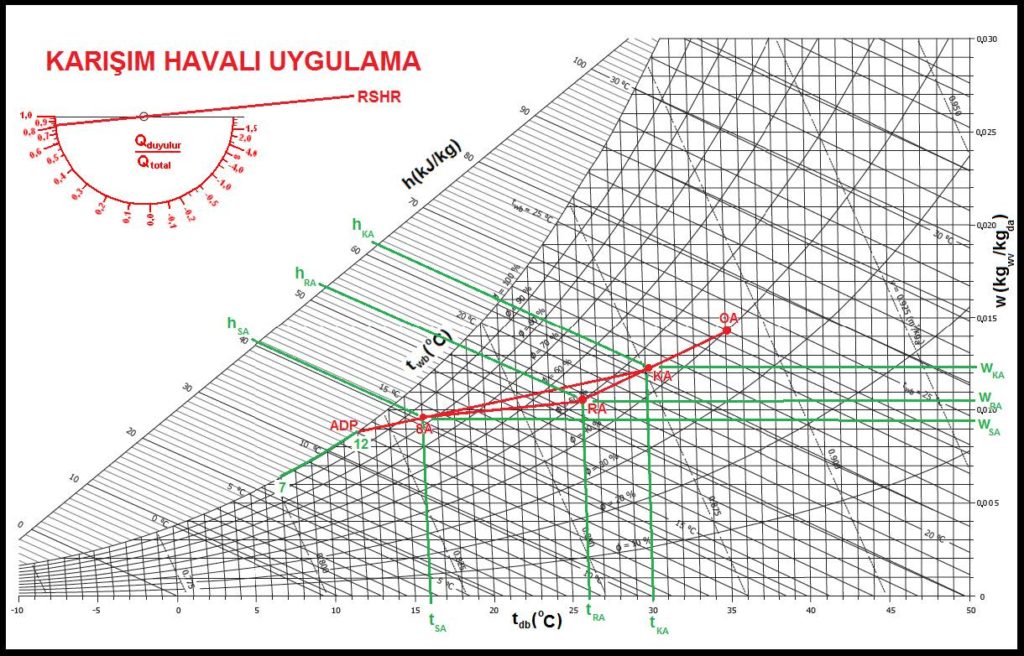
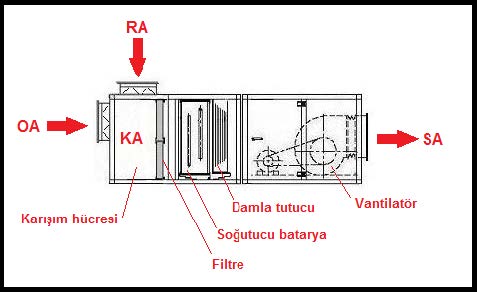
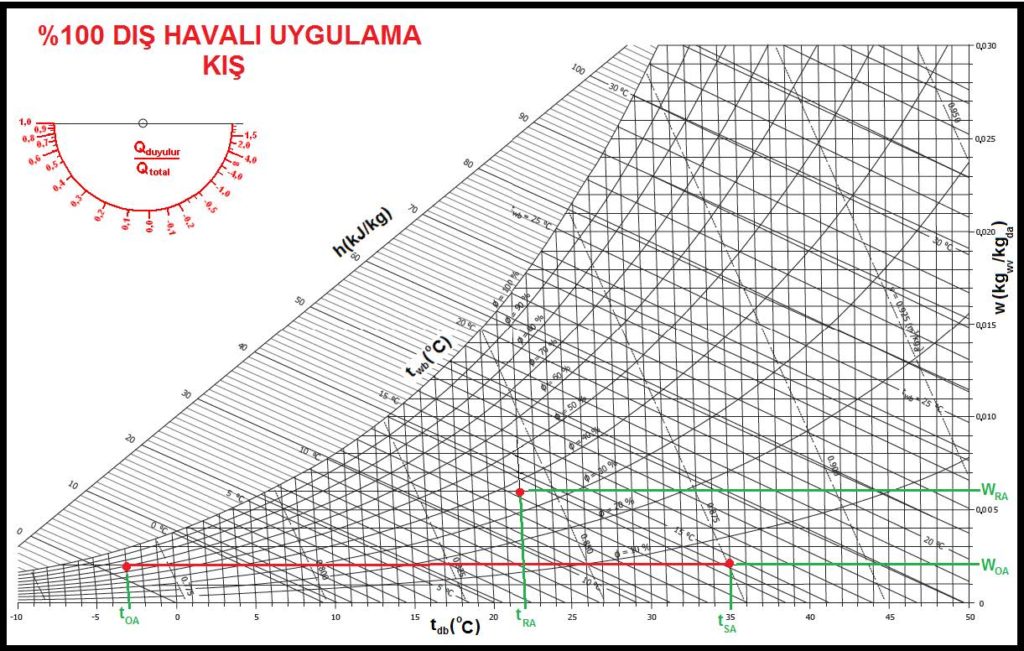
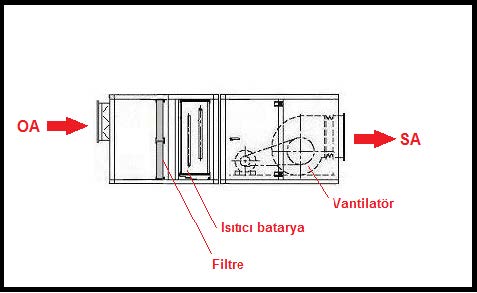
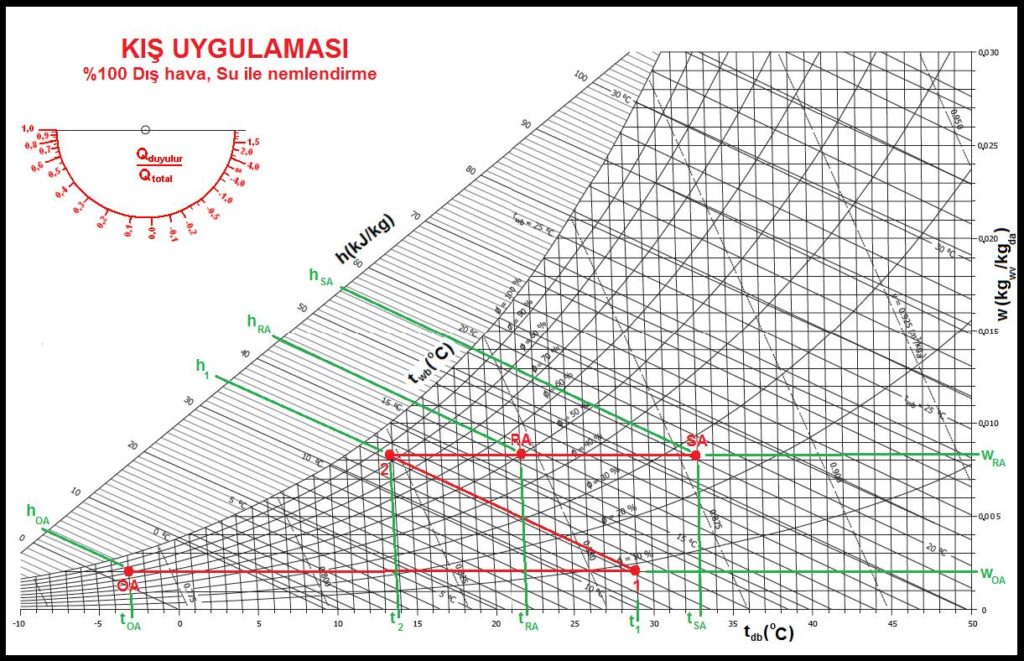
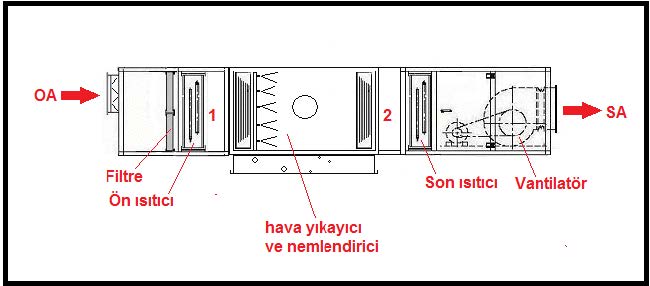
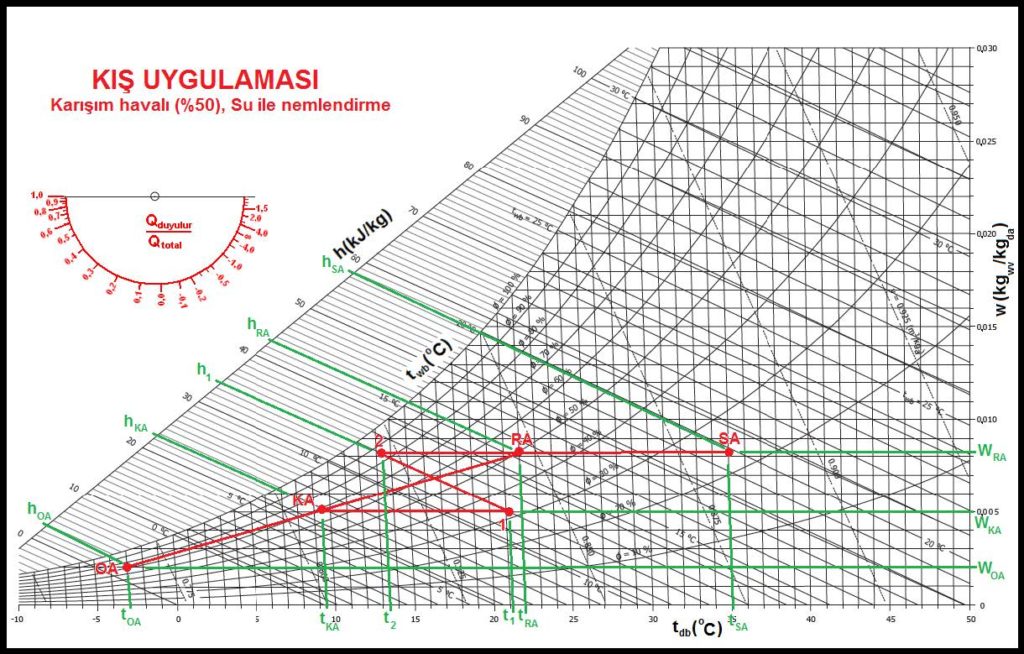
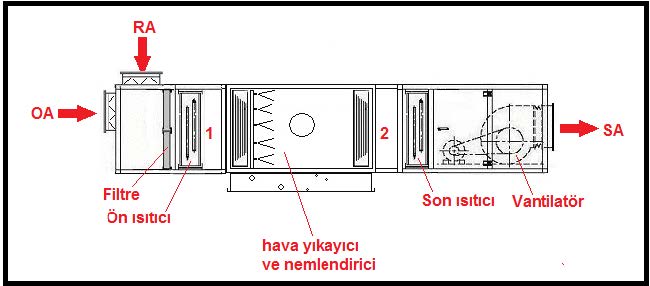
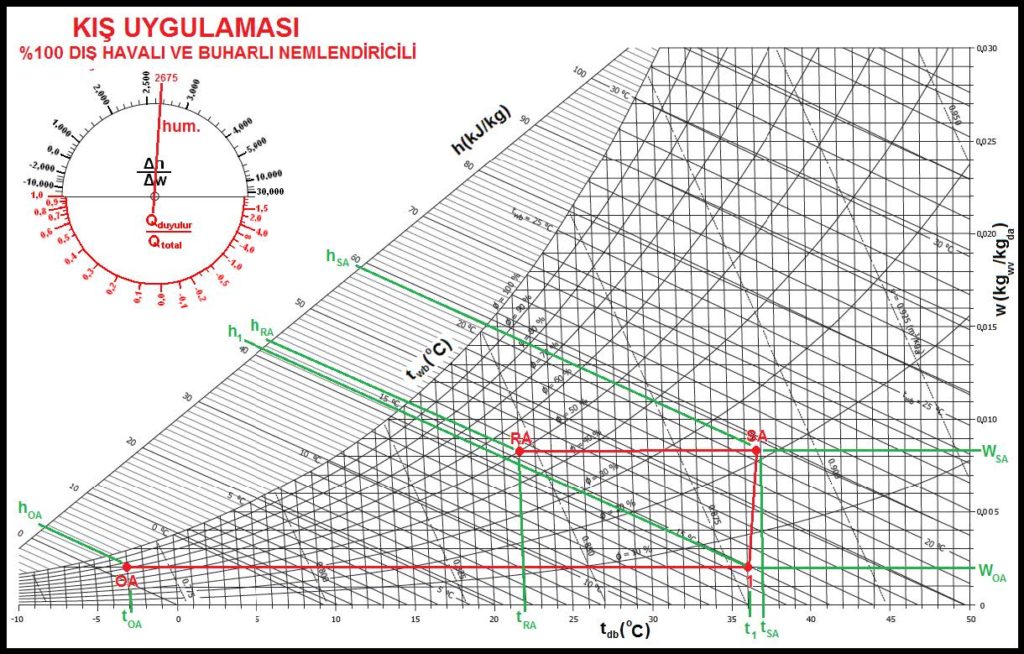
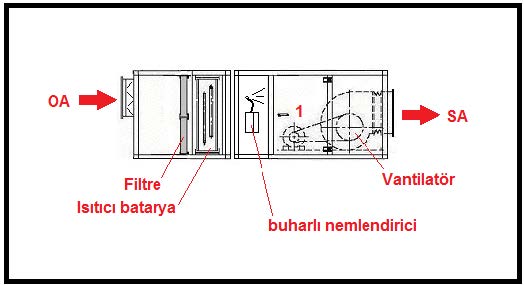
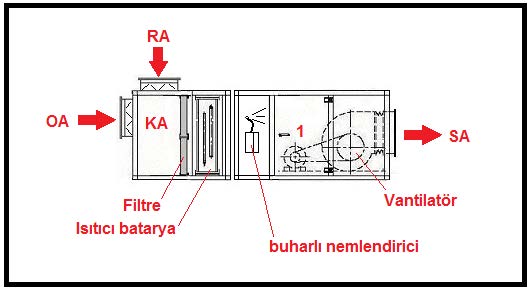
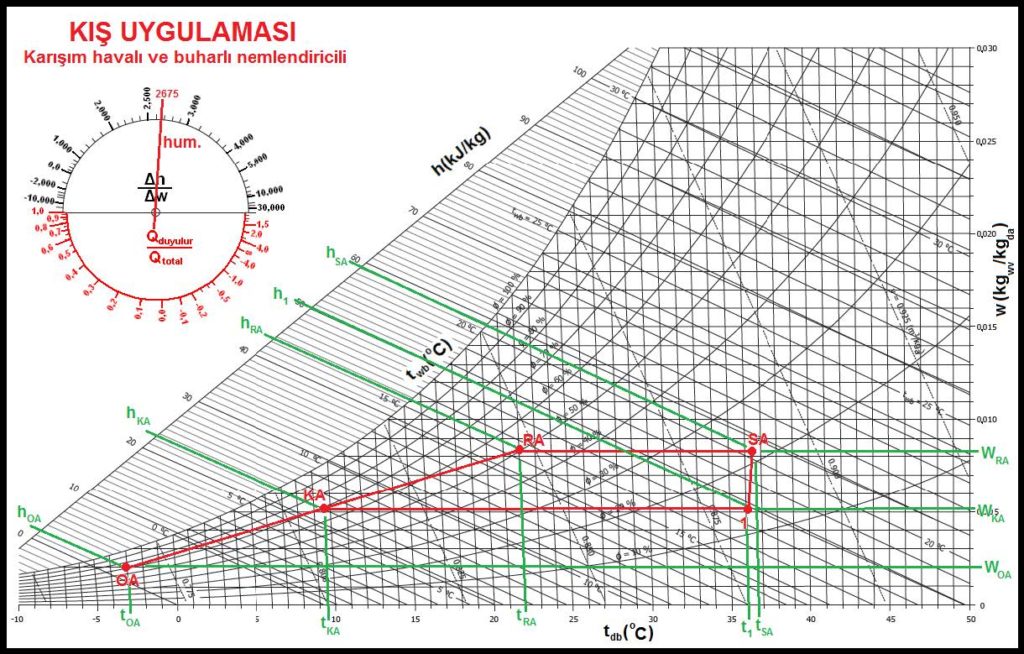
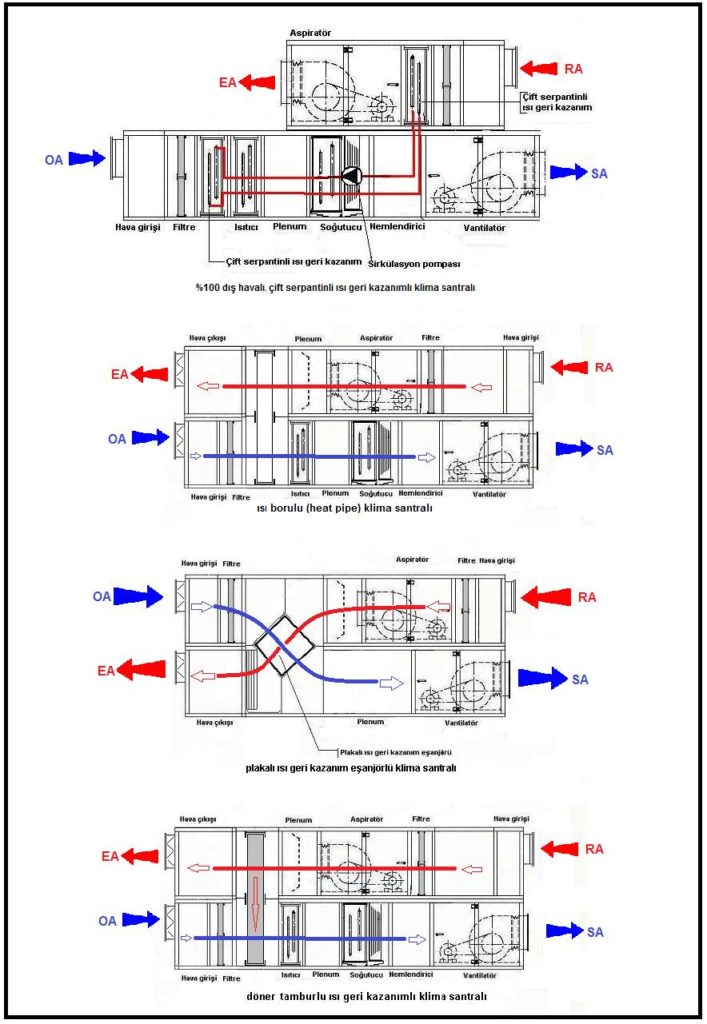

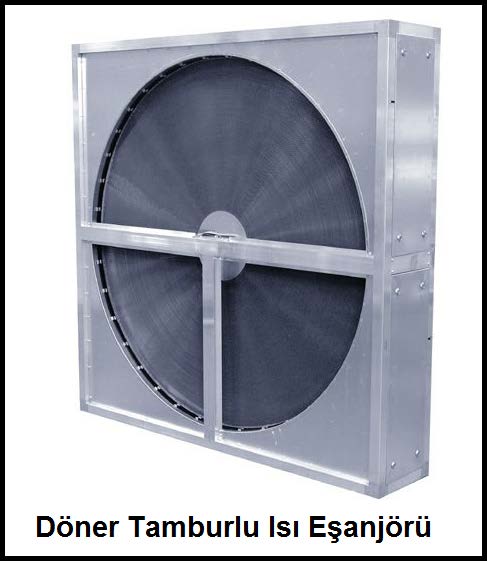
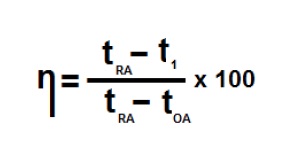
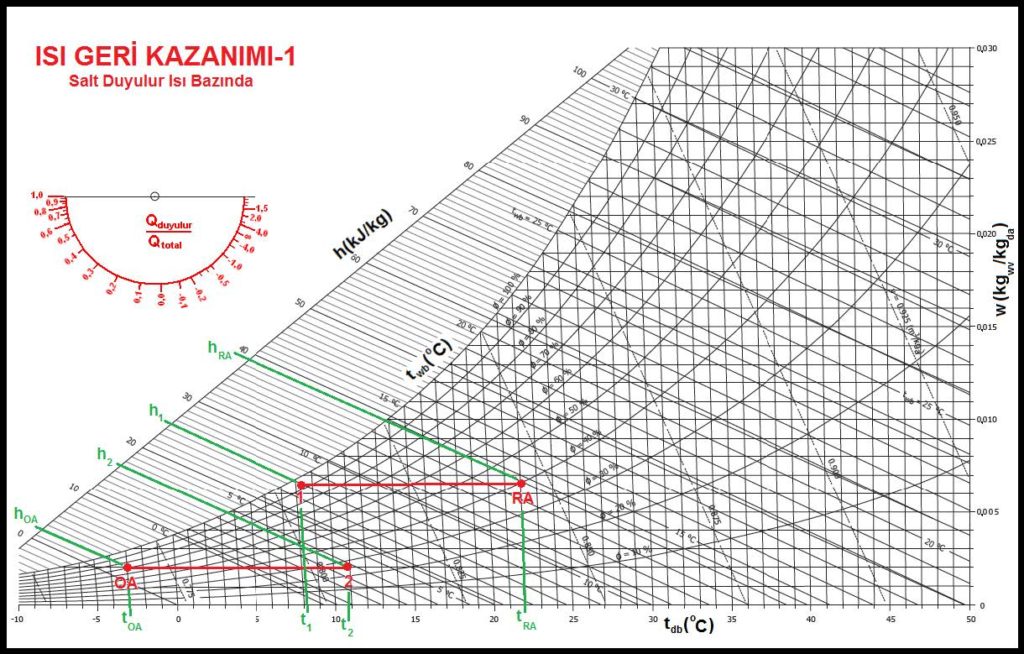
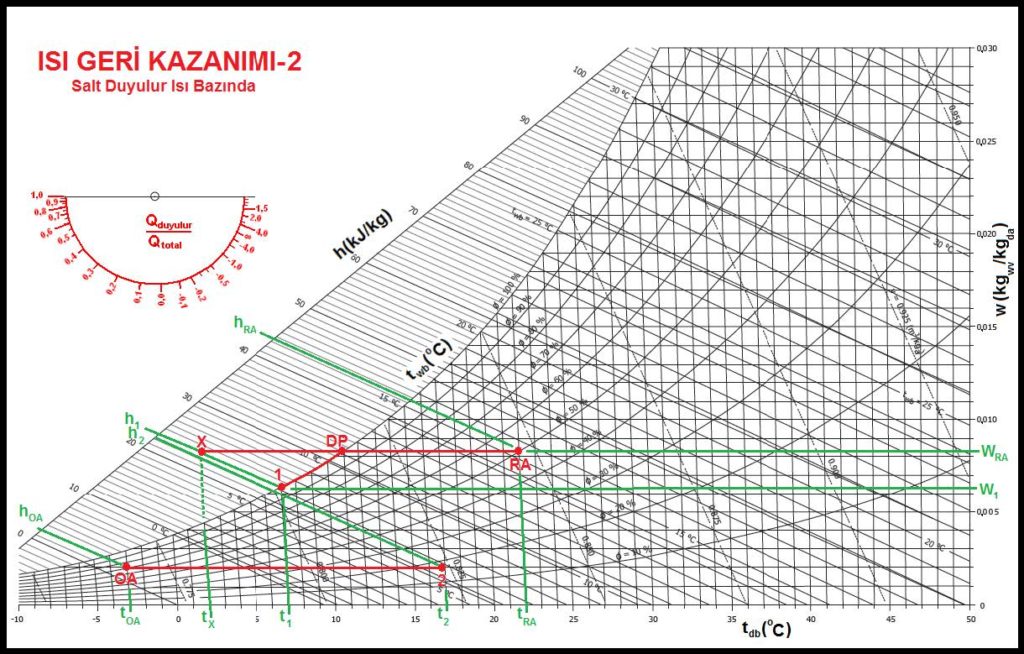 Bir önceki sayfada vermiş olduğumuz verim denklemini %80 için yaptığımızda hayali “tx” noktasını +2oC olarak buluruz. Ancak bu sıcaklık doyma eğrisinin üstünde olduğu için mümkün değildir. Ancak bu sıcakılığın özgül entalpisi denklemde kullanılabilir.
Bir önceki sayfada vermiş olduğumuz verim denklemini %80 için yaptığımızda hayali “tx” noktasını +2oC olarak buluruz. Ancak bu sıcaklık doyma eğrisinin üstünde olduğu için mümkün değildir. Ancak bu sıcakılığın özgül entalpisi denklemde kullanılabilir.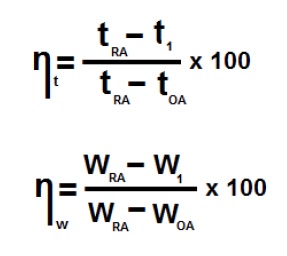
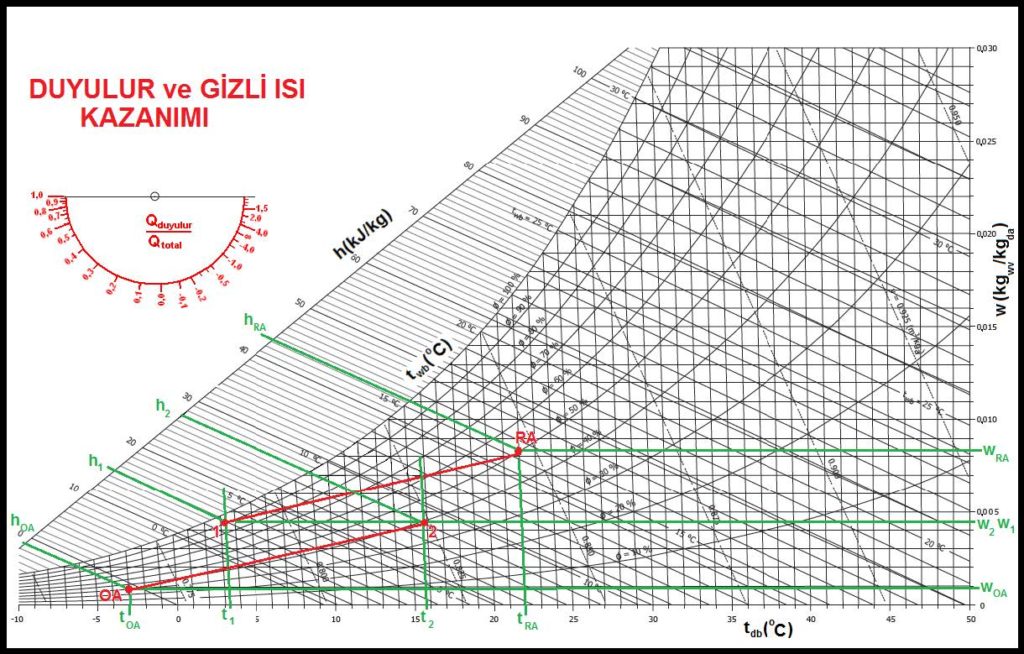
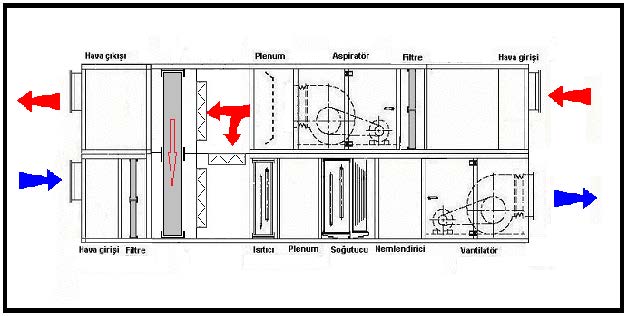
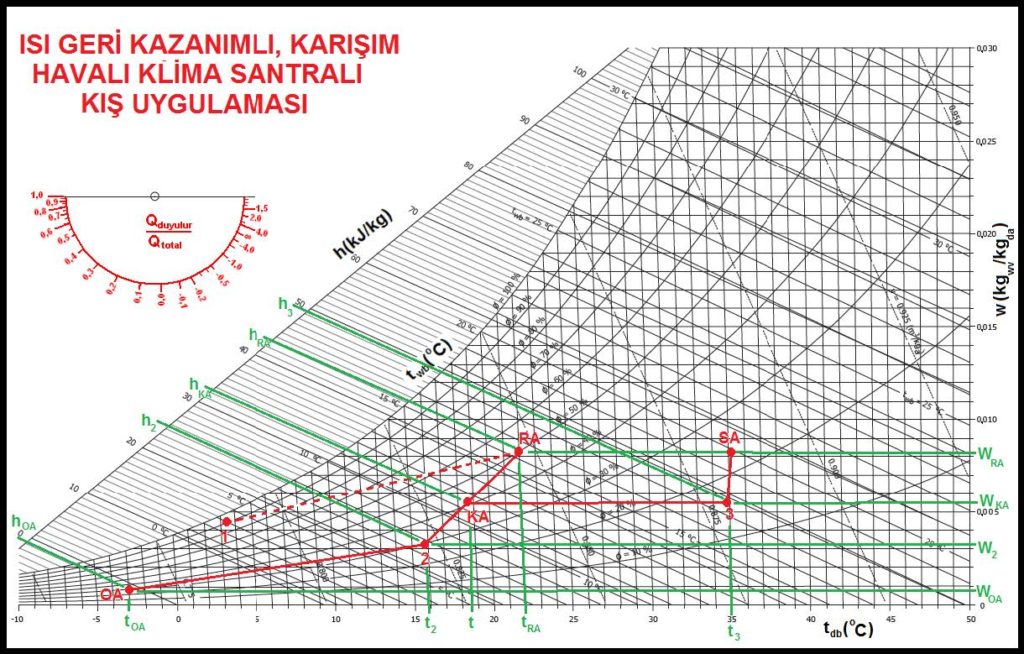
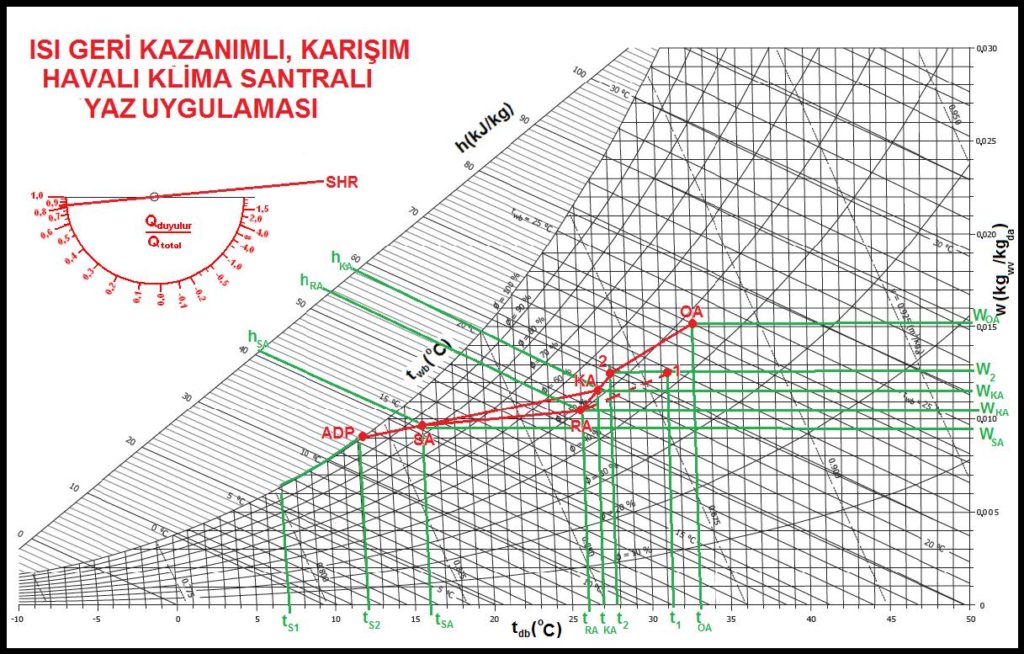 Yukarıdaki psikrometrik diyagramımızda 550 karışım havalı bir yaz uygulaması görülmektedir. Veriler aşağıdaki gibidir.
Yukarıdaki psikrometrik diyagramımızda 550 karışım havalı bir yaz uygulaması görülmektedir. Veriler aşağıdaki gibidir.