3. VANTİLATÖRLERDE DEBİ REGLAJI
3.1. Vantilatör ve Sistem Karakteristik Eğrileri
Klima santrallarında kullanılan vantilatörleri üç ana grupta toplamak mümkündür.Radyal ve aksiyal vantilatörler iki ana grubu oluştururlar. Son yıllarda kullanımı yaygınlaşan “plug fan”lar esas itibariyle salyangozu olmayan tek emişli radyal bir fan olmakla birlikte üçüncü bir grup olarak düşünülebilir.
Radyal fanlar da ikiye ayrılırlar.
· Öne eğik kanatlı vantilatörler
· Geriye eğik kanatlı vantilatörler
Öne eğik kanatlı vantilatörler, isminden de anlaşılacağı gibi öne eğik çok kanatlı bir çark yapısına sahiptir. İlk tasarımcısına izafeten “Sirocco” tipi fan olarak da adlandırılırlar.

3.1.1. Vantilatör Performans Eğrileri
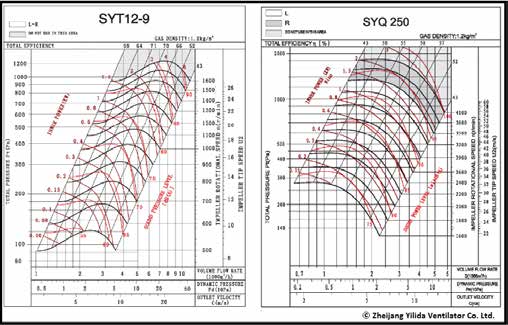
Öne eğik kanatlı vantilatörler oldukça yatık bir karakteristik eğriye sahiptir. Toplam basınç iki noktada zirve yapar. Serbest üfleme arttıkça vantilatörün çektiği güç te artar. Bu özellik elektrik motoru seçiminde muhakkak dikkate alınmalıdır. Genelde alçak ve orta basınç sınıflarında kullanılırlar. Geriye eğik kanatlı fanlara oranla daha alçak dönme hızında çalışırlar ve daha düşük ses seviyelerine sahiptirler.
Geriye eğik kanatlı fanlar geriye eğimli az sayıda kanattan oluşan bir çarka sahiptir. Orta ve yüksek basınç uygulamalarında kullanılırlar. Öne eğik kanatlılara nazaran daha yüksek verime sahiptirler. Daha yüksek dönme hızlarında çalışırlar.
“Plug fan”lar yapı ve karakteristikleri itibariyle geriye eğik kanatlı fanlara benzerler.
3.1.2. Sistem Basınç Kaybı Eğrileri
3.1.2.1. Çalışma Noktası
Bir klima sisteminin debisinin nasıl hesaplandığı 3.2. sayılı “Sabit Debili Sistemler” isimli konuda anlatılmıştı. Bu debinin tüm mahallere iletilmesi için belirli bir basınca ihityaç vardır. Bu basınç hava hızının oluşturduğu dinamik basınç ile statik basıncın toplamından oluşur. Statik basınç kanallardaki sürtünme kayıpları ile özel kayıplardan meydana gelir.
Özel kayıplar kanal üzerindeki, dirsek, klape vb. elemanlarla menfez, difüzör, VAV terminal kutusu gibi elemanlar ve klima santralından kaynaklanan dirençlerin toplamıdır. Bu kayıpların tümüne sistem basınç kaybı denir.
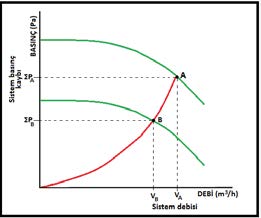
Sistem basınç kaybının debi ile, dolayısıyla hava hızıyla matematiksel bir ilişkisi vardır. Basınç kaybı debinin karesi ile orantılıdır.
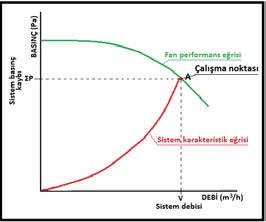
münasebet ikinci derece bir eğridir. Yukarıdaki grafikte kırmızı hat olarak gösterilmiştir. Kırmızı sistem karakteristik eğrisinin vantilatör karakteristik eğrisi ile kesiştiği nokta da çalışma noktasını oluşturur.
3.1.2.2. Çalışma Noktasının Değişmesi
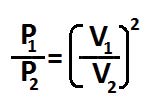
Sistemde basınç kaybına neden olan, yani direnç yaratan elemanların karakteristiklerinde bir değişiklik olmadığı taktirde çalışma noktası sistem karakteristik eğrisi üzerinde değişecektir. Buna örnek olarak fan devrinin değiştirilmesini gösterebiliriz. Hava debisi fanın dönme hızıyla orantılı olarak değişecek, basınç kaybı ise değişen hava debisi orantısının karesi ile orantılı olarak değişecektir. Dolayısıyla basınç değişikliği vantilatör devir değişikliğinin karesi ile orantılıdır.
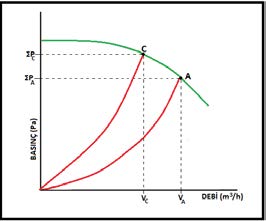
Bir de fanın devrini değiştirmeden sistem direncinin değiştiği durumu inceleyelim. Sistem üzerinde, örneğin vantilatör çıkışında bir damper olduğunu veya hijyenik uygulamalarda olduğu gibi bir hassas filtre (F7 ila F9) olduğunu farzedelim. Bu durumda “A” noktamız vantilatör performans eğrisi üzerinde sola doğru, “C” noktasına hareket edecektir. Aynı zamanda da sistem karakteristik eğrisi değişecektir. Çünkü sistemi oluşturan elemanların yarattığı dirençte değişiklik meydana gelmiştir.
3.1.2.3. Vantilatör ve Sistem Modülasyon Eğrileri
Değişken hava debili klima sistemlerinde tasarım hava debisi maksimum yüke göre belirlendiği için VAV terminal ünitesi içindeki debi regraj damperi tam açık olarak kabul edilir. Bu nedenle, damper kanadının 0okonumu için imalatçı firma kataloğunda herhangi bir direnç belirtilmemişse VAV terminal ünitesi reglaj damperinin sisteme verdiği direnç sıfır olarak kabul edilir (VAV terminal ünitesi bünyesinde plenum kutu, susturucu, ısıtıcı batarya gibi elemanlar bulunuyorsa bu elemanların yarattığı direnç mutlaka hesaba dahil edilmelidir). Ancak kısmi yüklerde hava debisi değişecek, bu paralelde de reglaj damperinin konumu değişecektir. Önceki sayfalarda debi değişikliğinin, eğer sistemi meydana getiren elemanların karakteristiklerinde bir değişiklik olmazsa sistem karakteristik eğrisi üzerinde meydana geleceğini belirtmiştik. Reglaj damperinin konumunun 0o’den 90o’ye doğru hareketi reglaj damperi karakteristiğinde bir değişiklik yapacak, bir direnç artımı meydana gelecektir. Başka bir deyişle, hava debisinin azalmasının karesiyle orantılı olarak sistem basınç kaybı da azalacaktır. Ancak bu azalmaya reglaj damperinin konumu nedeniyle basınç kaybı artışı eklenecektir.
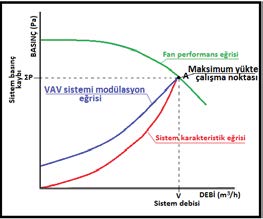
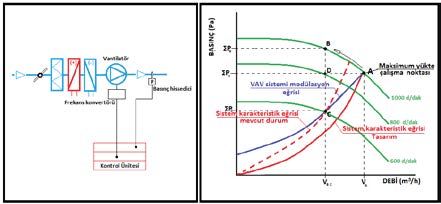
Dolayısıyla değişken hava debili bir klima sisteminde VAV terminal ünitesinin kısmi yükler nedeniyle hava debisini azaltması neticesi klima santralındaki vantilatörden gerçekleştirmesi istenecek eğri “Sistem Karakteristik Eğrisi” olmayıp “VAV Sistemi Modülasyon Eğrisi” olacaktır. Bu hususun gerçekleştirilmesi de bir kapalı devre kumanda sistemi ile gerçekleştirilecektir.
Mahallerdeki maksimum yükün azalması neticesi VAV terminal üniteleri projede öngörülen maksimum hava debisine ihtiyaç duymayacakları için regraj damperini kısmak suretiyle mahalle üflenen hava debisini azaltacaklardır. Reglaj damperinin kısık duruma geçerek debi reglajı yapması neticesi sistemdeki basınç kaybı artacaktır. Bu durumda vantilatörün devir hızı henüz değişmediği için maksimum yükte çalışma noktası olarak gösterilen “A” noktası fan performans eğrisi üzerinde sola kayarak “B” noktasına gelecektir. “B” noktasına gelinmesi neticesi “Sistem Karakteristik Eğrisi-Tasarım” değişikliğe uğrayarak “Sistem Karakteristik Eğrisi-Mevcut Durum”u oluşturacaktır. Ancak bizim istediğimiz “B” noktasında çalışma değildir. Her ne kadar bu nokta bizim için gerekli debiyi sağlıyorsa da sistemde gereğinden fazla bir basınç oluşmuş bulunmaktadır. Bizim arzumuz “VAV Sistemi Modülasyon Eğrisi” üzerindeki “C” konumunu elde etmektir. Bu durum da ancak fan devrinin modülasyonu ile mümkündür. Ancak kontrol ünitesinin bu işleme uygun programlanabilir bir ünite olması gereklidir.
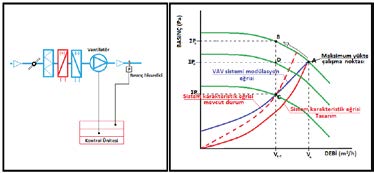
Bu dengeyi sağlamak için yukarıdaki çizimin sol tarafında bulunan basitleştirilmiş akış kontrol şemasındaki kontrol çevrimine ihtiyaç duyulmaktadır. Üfleme kanalı üzerinde, uygun bir noktaya yerleştirilmiş olan basınç hissedici eleman algıladığı basıncı kontrol ünitesine iletir. Bu uygulama neticesi olarak kontrol ünitesi vantilatörün devrini azaltır. Kontrol ünitesi önceden programlanmış ve “VAV sistemi modülasyon eğrisi” ile ilgili girdiler yüklenmiş ise “C” noktasındaki çalışmayı temin etmek üzere vantilatörün devrini düşürecektir. Ancak böyle bir yazılımın yüklenmesine uygun değilse yalnızca bir sabit basınç regülatörü olarak “ΣPA”nın sabit kalmasını sağlamak üzere vantilatörün “D” noktasında, daha yüksek bir devirde çalışmasını sağlayacaktır. Her iki durumda da “B” konumunda çalışmaya oranla bir enerji tasarrufu söz konusudur. Ancak kısmi yükte “C” konumunda çalışmak “D” konumunda çalışmaya oranla daha ekonomik bir yaklaşım oluşturmaktadır. İkisinin arasındaki fark özellikle öne eğik kanatlı radyal vantilatörlerde çok daha belirgindir.
3.2. Vantilatörlerde Debi Reglaj Sistemleri
Vantilatörlerde debi kontrolu dört değişik tarzda yapılmaktadır. Bu sistemlerden “Değişebilir Kanat Açıları” uygulaması yalnız aksiyal vantilatörlerde uygulanmaktadır. Diğer üç sistem ise hem radyal hem de aksiyal vantilatörlerde uygulama alanı bulmaktadır. Bu sistemler şunlardır.
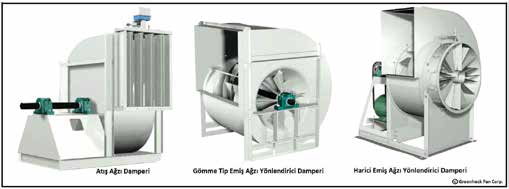
3.2.1. Atış Ağzı Damperleri
Vantilatörlerin atış ağzına damper konulması en eski debi reglaj uygulamasıdır. Bu uygulamanın temel prensibi vantilatörün dönüş hızını değiştirmeksizin atış ağzında yeterli direnci yaratarak debinin istenen seviyeye düşürülmesidir. Bu uygulamada kanala monte edilmiş basınç hissedici elemandan gelen sinyaller paralelinde kontrol ünitesi (bkz. resim sayfa-89) atış ağzı damperi oransal servomotoruna kumanda sinyali göndererek açma-kapama veya kısmi kapama işlemlerini gerçekleştirecektir. Atış ağzı damperindeki basınç düşümü “ΣPB-ΣPc” kadar olacaktır (bkz. resim). VAV terminal ünitesi girişindeki basınç kısmen azalacağı için ünite daha rahat ve sessiz çalışma olanağı bulacaktır. Debi azalması neticesi vantilatör motor gücünde bir enerji tasarrufu gerçekleşecektir. Bu tasarruf öne eğik kanatlı radyal vantilatörlerde oldukça belirgindir. Geriye eğik kanatlılarda ise orantılı olarak daha az bir enerji tasarrufu gerçekleşecektir. Diğer metodların daha yüksek verimliliğe sahip olmaları nedeniyle atış ağzı damperi uygulaması günümüzde çok nadiren yapılmaktadır.
3.2.2. Emiş Ağzı Yönlendirici Kanatlar
Emiş ağzı yönlendirici kanatlar veya yaygın tanımıyla IGV (IGV= Inlet Guide Vanes) diğer bir vantilatör debi reglaj sistemidir. Bu sistem de atış ağzı damperi gibi kısma hareketi neticesi belirli bir basınç kaybı yaratarak 89’uncu sayfadaki şekilde gösterilen “ΣPB-ΣPc” basınç kaybını gerçekleştirmek suretiyle VAV terminal ünitesindeki girişi “C” noktasına indirmektedir. Atış ağzı damper uygulamasından tek farkı vantilatörün emiş tarafında olmasıdır. Atış ağzı damperi ile benzer uygulama karakteristiklerine sahiptirler (bkz. Konu No. 3.2.5.). Aşağıdaki resimde her iki damper tipi de görülmektedir.
3.2.3. Değişebilir Kanat Açıları
Değişebilir kanat açıları yalnız aksiyal fanlarda kullanılabilen bir debi reglaj uygulamasıdır. Bu uygulamada aksiyal fanın kanatları bağımsız miller üzerine yerleştirilmiştir ve göbekten yataklanmıştır. Millerin ucuna bağlanmış olan mekanizma sayesinde kanat açıları, kanatçıkları birbirlerine paralel bir tarzda mil ekseni etrafında döndürmek suretiyle değiştirilerek vantilatör karakteristiklerinin değişmesi sağlanmaktadır. Bu mekanizma sayesinde vantilatörün devrini değiştirmeksizin, veya herhangi bir direnç yaratacak ayarlanabilir bir mekanizma, örneğin damper kullanmaksızın debi reglajı sağlanmaktadır. Ancak göbek mekanizmasının karışıklığı ve maliyetinin yüksekliği dolayısıyla çok büyük fanlarda, debisi 100.000 m3/h gibi olanlarda kullanılmakta, küçük aksiyal fanlarda devir sayısının reglajı tercih edilmektedir.
3.2.4. Frekans Konvertörlü Uygulamalar
Frekans konvertörü ile vantilatör debi reglajı günümüzde en çok kullanılan, kullanımı her geçen gün yaygınlaşan bir uygulamadır. Frekans konvertörleri, diğer tanımıyla invertörler alternatif akımın frekansını değiştiren elektronik veya elektro-mekanik bir cihazdır. Bunun bir türevi olan “Değişken Frekansla Tahrik” (VFD = Variable Frequency Drive) üniteleri elektro-mekanik sistemlerde alternatif akımla çalışan elektrik motorlarının devrini, frekans ve voltaj girdisini değiştirmek suretiyle değiştirir. Bu uygulama klima teknolojisinde yalnız vantilatör ve
aspiratörlerde değil, sirkülasyon pompalarında, soğutmada kullanılan vidalı, “scroll” ve yarı hermetik kompresörlerde de kapasite kontrolu için yaygın olarak kullanılmaktadır. Bu nedenle değişken debili klima sistemi uygulayıcıların karşısına değişik tarzlarda çıkmaktadır.

Yukarıdaki resimde Mitsubishi firması tarafından üretilen değişik boyutlardaki frekans konvertörleri görülmektedir. Frekans konvertörleri manuel olarak kontrol edilebildiği gibi dışarıdan gönderilen sinyaller ile de kontrol edilebilir. Günümüzün lektronik frekans konvertörleri BacNet, MetasysN2, Siemens FLN, LonWorks gibi sistem protokolleriyle haberleşebildiği gibi 0-5VDC, 0-10VDC, 0-20mA gibi analog girdilerle motor frekanslarını 0-60 Hz arasında ayarlıyabilmektedir.
Frekans konvertörlü uygulamalarda kontrol ünitesinin yapısı, yüklenmiş olan yazılım çok önemlidir. Eğer VAV modülasyon eğrisi ile doneler kontrol ünitesine yüklenmemişse, veya ünite buna müsait değil de yalnızca basınç hissediciden aldığı sinyalleri analog çıktı tarzında frekans konvertörüne iletebiliyorsa bu durumda VAV terminal ünitesi tarafından “A” konumundan “B” konumuna getirilmiş olan hava debisi gereksinimi neticesi statik basınç “ΣPA” sabit tutulacak, vantilatör bunun neticesi 1000 d/dak yerine 800 d/dak’ta çalışacaktır.
Bunun neticesi olarak ta 800 d/dak vantilatör karakteristik eğrisi üzerinde yer alan “D” konumu gerçekleştirilmiş olacaktır (Diyagramdaki vantilatör dönüş hızı değerleri örnek olarak verilmiştir.) Halbuki optimum çalışma durumu sistem VAV sistemi modülasyon eğrisi ile “VB,C” dikmesinin kesiştiği “C” konumudur. Ancak bu durumun gerçekleşebilmesi için VAV sistemi modülasyon eğrisi (debi-basınç münasebetleri) ile ilgili donelerin kontrol ünitesi görevini yapan DDC/BMS kontrol paneline yüklenmiş olması gerekir.
Diğer bir uygulama tarzı da üfleme kanalı üzerinde basınç ölçümü yerine vantilatör üfleme ağzına yakın bir yerde hava debisinin ölçülmesidir. Bu durumda da DDC/BMS paneline VAV sistemi modülasyon eğrisi esas alınarak hazırlanmış debi-basınç donelerinin veya formülün yüklenmiş olması gereklidir.
3.2.5. Debi Reglaj Sistemlerinin Karşılaştırılması
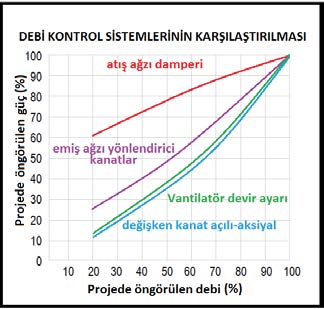
Yukarıdaki mukayese tablosu geriye eğik kanatlı radyal fanlar (çift emişli veya “plug-fan”lar) ile kanat açıları ayarlanabilir aksiyal fanlar esas alınarak hazırlanmıştır.Grafik değerleri yalnızca fikir vermek amaçlı olup laboratuar çıktıları değildir. Mukayese edilen sistemler arasında enerji tasarrufu açısından verimi en düşük olan atış ağzı damperi uygulamasıdır. Bu uygulamada fanın debisi azalmakla birlikte basıncı artmaktadır. Bunun neticesi olarak az ama belirgin enerji tasarrufu sağlanmaktadır. Bu tasarruf öne eğik kanatlı radyal fanlarda daha fazla, geriye eğik kanatlı radyal fanlarda ve plug-fanlarda daha azdır.
Diğer uygulama olan emiş ağzı yönlendirici kanatlar atış ağzı damper uygulamasına kıyasla daha fazla enerji tasarrufu sağlamaktadır. Radyal fanlarda fan devrinin değiştirilmesi en büyük enerji tasarrufunu sağlamaktadır. Günümüzde bu işlem frekans konvertörleri (invertörler) ile gerçekleştirilmektedir. Debinin %100’den %20’ye azaltılmasında devir sayısının ayarlanması kadar değişken kanat açılı uygulamalar da yaklaşık aynı oranda, %80’in üzerinde tasarruf sağlamaktadır.
3.3. Sistem Statik Basıncının Kontrolu Bahsettiğimiz dört kontrol sisteminin tamamı fan kapasite kontrolunu yapabilmek için statik basınç sinyaline ihtiyaç duyarlar. Kontrol ünitesi ölçülen değer ile olması gereken değerleri karşılaştırır, buna göre gerekli kontrol önlemlerini alır. Bu sistemleri aşağıdaki gibi tanımlayabiliriz.
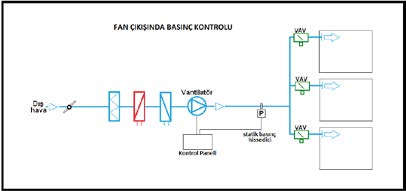
3.3.1. Fan Çıkışında Basınç Kontrolu Fan çıkışına yerleştirilen bir adet statik basınç hissedici elemanla yapılan ölçümlerdeki temel amaç üfleme kanalındaki havanın basıncını sabit tutmaktır. Hissedici elemandan alınan sinyaller paralelinde kontrol paneli vantilatör üzerindeki lontrol elemanlarına kumanda ederek üfleme kanalı girişindeki basıncı sabit tutmaya çalışır. Bu uygulama en temel basınça bağlı vantilatör debi kontrol sistemidir.
3.3.2. Üfleme Kanalında Basınç Kontrolu Fan çıkışındaki dalgalanmalar ölçme hassasiyetini etkileyeceği için basınç hissedici elemanın üfleme kanalı üzerinde, kritik VAV terminal ünitesine daha yakın bir yere konulması önerilmektedir. Bu uygulama ile en uzak mesafedeki ünitenin de güvence altına alınacağı varsayımı vardır.
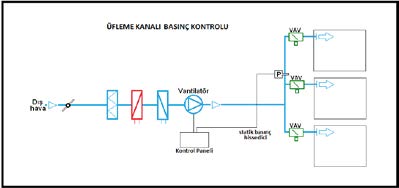
Fan çıkışında basınç kontrolu ile üfleme kanalı üzerinde basınç kontrolu arasında çok büyük bir fark yoktur. Çünkü her iki metod da üfleme kanalındaki statik basıncın sabitlenmesini öngörmektedir. Halbuki, daha önceki bahislerde de anlatıldığı gibi sistemin azalan debi nedeniyle o kadar basınca ihtiyacı yoktur.
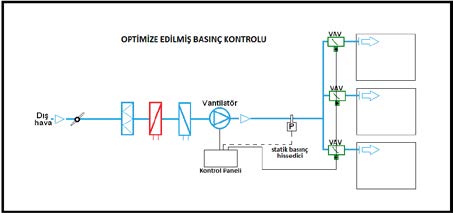
3.3.3. Optimize Edilmiş Basınç Kontrolu Bu nedenle optimize edilmiş statik basınç kontrolu metodu geliştirilmiştir. Diğer bir adı da “Optimize VAV Sistemleri” olan bu metodda vantilatör çıkışına yine bir basınç hissedici eleman yerleştirilmekte ve bu konumdaki statik basınç ölçülmektedir. Buna ilaveten tüm VAV terminal ünitelerinin damper konumları da bina otomasyon sistemine tek kablolu haberleşme ağı üzerinden (MP-Bus, LONWORKS, Modbus vb.) iletilmektedir. Damperlerin konumlarına bağlı olarak, istenen statik basınç temin edilmiş olsa dahi vantilatörün devri düşürülmekte ve sistemin daha düşük bir statik basınçta çalışması sağlanmaktadır. Bunun neticesi olarak VAV terminal ünitelerinin damperleri kısmen daha açık bir konuma gelmekte, sistem de daha düşük bir toplam basınçla çalışmaktadır. Bu uygulama daha önce bahsettiğimiz “VAV Modülasyon Eğrisi”nin gerçekleştirilmesidir ve radyal fanlarda en optimum enerji tasarrufunu sağlamaktadır.
Bu konuda bir gelişme de VAV terminal ünitelerinin servomotorlarını üreten BELİMO firmasından gerçekleştirilmiştir. “Fan Optimiser” sistemi olarak adlandırılan bu uygulamada statik basınç hissedici kaldırılmıştır. Aşağıda şematik olarak gösterilen bu sistemde damper
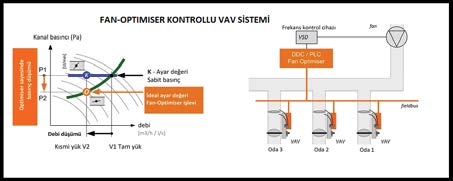
konumları kontrol paneline haberleşme ağı “fieldbus” tarafından iletilir. Gelen bilgiler “Fan Optimiser” tarafından değerlendirilir ve damperlerin çoğu optimum çalışma aralığında olana kadar fanlar optimum ayar noktası olan “O” konumuna kadar getirilir. Neticede VAV sistemi daha düşük devirde, daha düşük basınçta çalıştırılarak enerji tüketimi ve ses seviyesi ciddi ölçüde azaltılmış olur.
3.3.4. Kısmi Yükteki Uygulamaların Karşılaştırılması
Kısmi yükteki uygulamaların karşılaştırılmasında ABD’li TRANE firması %75 kısmi yükte çalışmayla ilgili yaptığı bir etüdün neticesinde vantilatör çıkışında yapılan basınç kontrolü ile enerjide %40, optimize edilmiş basınç kontrolu ile %57 enerji tasarrufu yapıldığını tespit etmiş bulunmaktadır. İkinci olarak incelediğimiz BELİMO firması ise aşağıdaki tabloyu sunmaktadır.
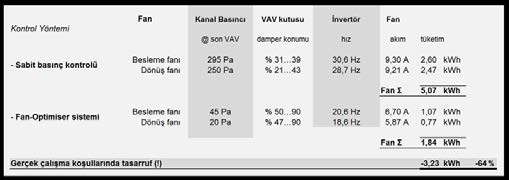
Bu ölçüm seçilen bir günde bir ofis kompleksinde gerçekleştirilmiştir ve sadece söz konusu olan zaman ve şartlarda %64 enerji tasarrufu yapıldığı tespit edilmiştir. Sisteme ve kısmi yük şartlarına, örneğin dahili yükler, hava şartları, kullanım tarzı gibi girdilere bağlı olacağı bir yıllık bir çalışma süresinde enerji tasarrufunun %20 ile %50 olacağını belirtmektedir. Bu sayede de EN 15232 A-sınıfı uyumlu bir çözüme yaklaşılmış hatta gerçekleştirilmiş olacaktır.